|
Steuerung des Triebwagens |
|||
| Navigation durch das Thema | |||
|
Für die Steuerung des
Triebwagens
wurde eine Quelle benötigt, die auch funktionierte, wenn die
Fahrleitungsspannung
nicht vorhanden war. Schliesslich musste das Fahrzeug bekanntlich
eingeschaltet werden und für die dazu benötigten Befehle und Signale,
brauchte man eine Steuerung. Da dazu elektrische Signale genutzt wurden,
musste die entsprechende Versorgung mit gespeicherter
Spannung
erfolgen.
Da bei
Bleibatterien
jede Zelle eine
Spannung
von zwei Volt erzeugen konnte, hatte jeder Behälter eine Spannung von 18
Volt.
Mit zwei in Reihe ge-schalteten
Batterien
wurde letztlich die für die Steuerung benötigte Spannung von 36 Volt
Gleich-strom
erreicht. Da die Batterien auch für die Beleuchtung benötigt wurden, verdoppelte man diese. So dass immer zwei Batterien in Reihe und parallelgeschaltet wurden. Diese Lösung war bei Triebwagen üblich.
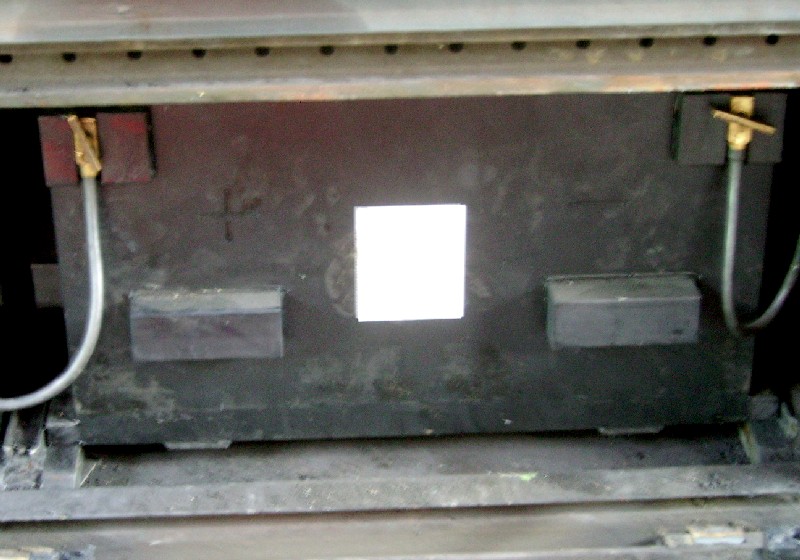
Jedoch mussten so vier schwere
Bleibatterien
ein-gebaut werden. Den Platz dafür fand man unter dem Kasten auf der
linken Seite zwischen dem
Gepäckabteil
und der
Einstiegstüre.
Der Batterie-kasten war so ausgelegt worden, dass diese leicht gewechselt
werden konnten.
Geladen wurden diese
Batterien
ab der
Zugsam-melschiene.
Dazu war ein statisches
Ladegerät
eingebaut worden. Dieses Ladegerät war von der
Leistung
her so ausgelegt worden, dass es für die Versorgung des
Triebwagens
ausreichte und immer noch genug Leistung vorhanden war, dass die Batterien
geladen werden konnten. Damit übernahm das Ladegerät die Steuerung in dem
Moment, wo die Zugsammelschiene
Spannung
führte.
Aus diesem Grund war es zusätzlich sinnvoll, dass die Kapazität
der eingebauten
Bleibatterien
verdoppelt wurde. Es dauerte bei diesem
Triebwagen
etwas länger, bis die Ladung einsetzte. Hinzu kam, dass im Gegensatz zur
Lösung mit den
Hilfsbetrieben
die Versorgung des
Ladegerätes
nicht umgehend nach dem Einschalten einsetzte. Die
Batterieladung
musste mit einer zusätzlichen Handlung des Personals geschaltet werden.
Die alten runden Lampen der Schweizerischen Bundesbahnen SBB
hatten ausgedient. Stattdessen verwendete man angepasste Lampen aus dem
Strassenverkehr. Dank diesen Lampen war eine verbesserte
Beleuchtung
möglich. Verbessert wurde das Spitzensignal mit den drei weissen Lam-pen, da neben dem üblichen Abblendlicht neu auch Scheinwerfer vorhanden waren, die Volllicht geben konnten. Dazu wurden handelsübliche Halogenlampen aus dem Bereich der LKW ver-wendet.
Da diese mit 24
Volt
betrieben wurden, musste man ein Vor-schaltgerät einbauen, das diese
Spannung
bereitstellen konnte. Sie sehen, dass man auf spezielle Teile nach
Möglichkeit ver-zichtete. In der Lampe integriert war die rote Leuchte, die seitlich am Rand angeordnet war. Bei den verwendeten Lampen war dort eigentlich der Blinker vorhanden.
Daher wurde nur das farbige Glas innen durch ein rotes ersetzt.
Wenn die rote Lampe leuchtete, war die weisse Lampe dunkel. Natürlich war
das umgekehrt auch der Fall. Der Grund war die Ansteuerung mit einem
einfachen Drehschalter. Der konnte nicht beide Lampe gleichzeitig
ansteuern.
Es kamen drei solcher Lampen in Form eines A zum Einbau. Die
beiden unteren Lampen wurden im schmalen senkrecht verlaufenden Teil der
Front
eingebaut und hatten die rote Lampe jeweils aussen. Ergänzt wurden sie mit
einer über dem
Führerstand
im Dach montierten dritten Lampe. Diese konnte im Gegensatz zu den unteren
Lampen kein
Volllicht
geben. Mit diesen Lampen konnten daher sämtliche
Signalbilder
gezeigt werden.
Für die
Beleuchtung
der Abteile verwendete man Fluoreszenzlampen. Diese befanden sich hinter
Abdeckungen, so dass die Lampen nicht zu erkennen waren und es in den
Abteilen zu einer Streuung des Lichtes kam. Dadurch war das ganz Abteil
trotz des mittigen Leuchtbandes gleichmässig erhellt worden. Im Bereich
der
Plattform
des Einstieges waren Deckenspots verwendet worden. Leselampen an den
Tischen fehlten jedoch.
Die
Beleuchtung
der dienstlichen Abteile und Anzeigen erfolgte mit einfachen Glühbirnen.
Diese hatten sich in den Jahren zuvor durchgesetzt und auf spezielle
Abdeckungen der Leuchtmittel konnte verzichtet werden. Zudem waren diese
Lampen unabhängig von jener der Abteile zu bedienen. In den technischen
Räumen montierte Lampen erloschen automatisch, wenn die Türen wieder
geschlossen wurden.
Neben der Ansteuerung der Funktionen, war es die Aufgabe der
Steuerung auch Fehler zu erkennen. Das erfolgte in den meisten Fällen mit
Schaltautomaten,
Sicherungen
oder speziellen
Relais.
Die lösten aus, wenn ein Stromwert überschritten wurde. Relais reagierten
auch, wenn die
Spannung
fehlte, oder diese zu tief war. Einfache Systeme, die sich über Jahre
bewährten, mit der modernen Technik jedoch nicht mithalten konnten.
Daher versah man den
Triebwagen
mit einem Leit- und Überwachungssystem. Die bisherige Praxis mit einfachen
Relais
war wegen der komplizierteren Technik schlicht nicht mehr möglich.
Detaillierte Angaben und deren Dringlichkeit mussten unterschieden werden
können. Diese Lösung wurde dabei mit einer einfachen Technik verwirklicht,
die ohne Rechner auskam und trotzdem viel mehr Information ausgeben
konnte.
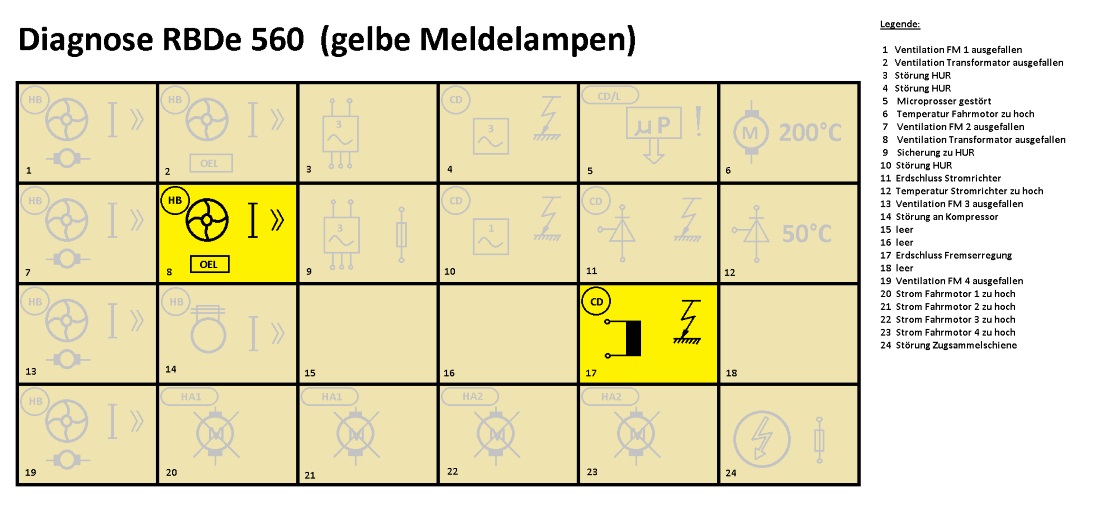
Die Störungen wurden von der
Leittechnik
erkannt und mit dem
Diagnosesystem
im
Führerstand
an einer Meldetafel angezeigt. Je nach gezeigten Meldelampen, konnte der
Lokführer das Fahrzeug soweit wieder in Stand setzen, dass eine Notfahrt
möglich wurde. Bei dieser Notfahrt standen jedoch gewisse Funktionen nicht
mehr zur Verfügung. Es sollte aber eine Räumung der Strecke in den meisten
Fällen möglich werden.
Man kann das System dieses
Triebwagens
als Urtyp der modernen
Diagnosesystemem
bezeichnen. Die elektronischen Anzeigen waren bereits vorhanden, nur
musste der Lokführer die notwendigen Schlüsse zu Behebung der Störung noch
selber finden. Im allerschlimmsten Fall konnte er aber mit wenigen
Handgriffen eine Notbedienung einrichten. Da keine vollwertige Diagnose
vorhanden war, musste die Störung für die Reparatur genau dokumentiert
werden.
Der zweite Grund fand sich in der von den Schwei-zerischen
Bundesbahnen SBB gewünschten auto-matischen Regelung der
Zugkraft
anhand der einge-stellten Geschwindigkeit. Daher wurde die Steuer-ung
angepasst. Mit dem Fahrschalter der bisherigen Befehlsgeber-steuerung wurde daher eine Lösung verwirklicht, die dem geänderten Verhalten entsprach. Während die Symbole mit - ● M + und ++ gleich blieben, hatten sie andere Funktionen bekommen.
So stieg der Stromwert in der Stellung ++ rasch bis auf 1 100
Ampère
und somit den maximalen
Fahrmotorstrom
an. Dieser blieb dann bestehen, bis die maximale Fahrmotorspannung
erreicht wurde. Auf der Stellung + wurde bis zu 950 Ampère hoch-geschaltet. Dieser Stromwert blieb dann bis zur Erreichung der maximalen Fahrmotorspannung ebenfalls erhalten.
Der Lokführer konnte aber mit Hilfe der Stellungen ++ und +
bestimmte Stromwerte manuell einstellen. Er verbrachte dazu den
Fahrschalter in die Stellung ++ bis der gewünschte
Fahrmotorstrom
erreicht war. Verbrachte er nun den
Fahrschalter
auf + wurde der
Strom
gehalten.
Die Stellung M liess den Stromwert langsam bis 750
Ampère
ansteigen. Das Verhalten der Steuerung war beim verbringen des
Fahrschalters
von der Stellung + oder ++ in die Stellung M gleich. Das heisst, mit den
obersten drei Stellungen konnten die Stromwerte festgelegt werden. Die
gewünschten Werte erkannte der Lokführer an den Anzeigen, genauer beim
grünen Zeiger für den Sollwert. Der effektive Wert hatte eine eigene
Anzeige erhalten.
Dank der Möglichkeit, einen bestimmten Stromwert sehr genau
einzustellen und zu halten, war es leicht mit dem Zug eine optimale
Beschleunigung zu ermöglichen. Gerade bei schlechtem Zustand der
Schienen,
erleichterte diese Lösung dem Lokführer die Arbeit deutlich. Verbrachte nun der Lokführer den Fahrschalter in die Stellung ●, reduzierte sich der Fahrmotorstrom auf den Wert, der zur Beibehaltung der Geschwin-digkeit notwendig war. Der Triebwagen wurde nun statt in der Zugkraft-steuerung in der gewünschten Geschwindigkeitssteuerung gefahren.
Durch kurzes verbringen des
Fahrschalters
in die Stellung M oder – wurde die Geschwindigkeit verlangsamt oder
erhöht. Verblieb der Fahrschalter in Stell-ung -, wurde die
Zugkraft
allmählich auf 0 abgeschaltet. Die Geschwindigkeitssteuerung funktionierte jedoch nur im Fahrbetrieb. Wechselte man mit dem Fahrschalter in den Bremsbetrieb, wurde die elektrische Bremse im Befehlsgebermodus bedient. Jedoch blieb hier ein eingestellter Stromwert durchwegs beibehalten.
Erst kurz vor dem Stillstand wurde die
elektrische
Bremse durch die Steuerung ausgeschaltet. Es war
daher auch mit der elektrischen Bremse leicht, eine gleichbleibende
Geschwindigkeit zu halten.
Im Vergleich zur
Nachlaufsteuerung der als Muster dienenden
Triebwagen,
war diese Lösung durchaus leicht verbessert worden. Der Lokführer gab die
gewünschte
Zugkraft
vor und beschleunigte damit den Triebwagen mit einer gleichbleibenden
Zugkraft. Kurz bevor die erlaubte Geschwindigkeit erreicht wurde,
unterbrach der Lokführer mit der Stellung ● die Zuschaltung der Zugkraft
und die Steuerung mit der Geschwindigkeit übernahm nun die Regelung.
Zwingend eingebaut werden musste eine Fern- und
Vielfachsteuerung.
Diese war notwendig geworden, denn der
Triebwagen
konnte ohne einen
Steuerwagen
nicht sinnvoll eingesetzt werden. Das war eine direkte Folge des
Verzichtes auf den zweiten
Führerstand.
Zudem hatten sich diese Lösungen bei den Schweizerischen Bundesbahnen SBB
bei Triebwagen schon längst durchgesetzt. Viel grösser war das Problem mit
den Kombinationen.
Damit die Signale übertragen werden konnten, wurden an den beiden
Stossbalken
die entsprechenden Steckdosen montiert. Diese wurden, wie bei den anderen
mit solchen Systemen eingesetzten
Triebwagen
im Bereich des Stossbalkens montiert und befanden sich jeweils links von
der
Kupplung.
Das benötigte Kabel wurde beim Triebwagen im
Gepäckabteil
in einer speziellen Ablage mitgeführt. So konnte die Einrichtung überall
erfolgen.
Die Codierung der Signale, beziehungsweise die Belegung der Adern
wurde vom Vst-System
IIId
übernommen. Wobei die übertragenen Befehle nicht genau stimmten und so
eine Kombination mit den Baureihen
RBe 4/4 und
Re 4/4 II nicht
möglich war. Anders sah das jedoch mit den Steuerwagen der Staatsbahn aus. Diese konn-ten aus dem vorhandenen Bestand übernommen werden. Die übermittelten Signale wurden lediglich an den Triebwagen übermittelt.
Abweichungen gab es jedoch bei den auf dem
Steuerwagen
angezeigten Werten für die
Fahrmotoren.
Daher mussten an den Steuerwagen gewisse Funktionen, die für die
Re 4/4 II
benötigt wurden, abgetrennt werden. Wenn wir schon spezielle Fälle haben, dann gilt, dass der Triebwagen mit einem Schalter zu einem Steuerwagen umgestellt werden konnte. Das war nötig, wenn ein Defekt den Betrieb nicht mehr ermöglichte.
Die
Fernsteuerung
von
Lokomotiven der Reihe
Re 4/4 II und
von
Triebwagen
RBe 4/4 war jetzt auch ab
dem RBDe 4/4 möglich. So konnten die Hilfs-lokomotiven an den
Pendelzug
gekuppelt werden. Ein Punkt, der wichtig sein konnte.
Es war maximal möglich drei solcher
Triebwagen
in
Vielfachsteuerung
unter sich einzusetzen. Ebenso viele Triebwagen konnten von einem
passenden
Steuerwagen
aus bedient werden. Der Grund für diese Beschränkung war, dass mit dem
System eine Beschränkung auf zwölf
Triebachsen
vorhanden war. Wobei es kaum vorkommen sollte, dass solche Kombinationen
von Triebwagen angewendet werden würden. So gesehen keine Einschränkung.
Dabei informierte bei der ersten Stufe eine Meldelampe den
Lokführer über die Gefahr. Bei der Stufe zwei wurde die Schleuderbremse
angelegt und so die zu schnell drehende
Achse
eingebremst. Diese Stufe war jedoch beim
Gleitschutz
nicht aktiv. Bei der Stufe drei wurde schliesslich die Zugkraft reduziert. Jetzt kamen die Anzeigen im Führerstand zum Zug. Auf der grünen An-zeige konnte die vorgegeben Zugkraft abgelesen werden. Die vor-handene Zugkraft konnte abweichen.
Bei verbessertem Schienenzustand erfolgte beim
Schleuderschutz
zudem automatisch wieder die Erhöhung der
Zugkraft
auf den vom
Lokomotivpersonal
vorgegebenen Wert. Beim
Gleitschutz
erfolgte jedoch keine Zuschaltung. Die letzte und vierte Stufe stellte den Überdrehzahlschutz dar. Dieser sprach an, wenn eine Triebachse mit 154 km/h oder mehr drehte. Die Aktion, die nun eingeleitet wurde, war das Auslösen des Hauptschalters.
So fiel die
Zugkraft
weg und es konnte nicht beschleunigt werden. Hingegen war die umgekehrte
Situation mit gänzlich blockierten
Rädern
nicht überwacht, da das System diesen Vorfall nicht vom Stillstand
unterscheiden konnte.
Auch eine Überwachung für den Lokführer und dessen Handlungen war
vorhanden. Dabei wurden die Signale mit der
Zugsicherung
nach
Integra-Signum
überwacht. Natürlich besassen die
Triebwagen
dabei auch die
Haltauswertung.
Die Zugsicherung war auf dem aktuellsten Stand. Durch die lange
Ablieferung wurden die letzten Triebwagen auch mit
ZUB 121
ausgerüstet. Dieses System war bei den ersten Modellen noch in der
Erprobung.
Erfolgte auch jetzt keine Reaktion, wurde der
Hauptschalter
ausgeschaltet und eine
Zwangsbremsung
eingeleitet. Eine Rückstellung war jedoch jederzeit mit dem
Pedal
möglich. Dieser «Schnellgang» war von der Funktion her mit den anderen vorhandenen Triebfahrzeugen identisch. Auch hier war es in einer solchen Situation jedoch nicht möglich, dem eventuell erkrankten Lokführer schnell zu Hilfe zu eilen. Dazu
war zumindest bei den ersten
Triebwagen
noch kein
Funkgerät
vorhanden. Da anfänglich jedoch
Zugpersonal
mitfuhr, war die Hilfe schnell vor Ort, so dass keine schweren Folgen zu
befürchten waren. Bei langen Fahrten, wo kaum Handlungen vorgenommen werden mussten, konnte der Lokführer ungewollt unkonzentriert oder gar müde werden.
Gerade bei dem hier vorgestellten Fahrzeug war das sehr schnell
möglich, da der Zug ohne grosse Handlungen längere Zeit mit korrekten
Geschwindigkeiten fuhr. Daher musste als Ergänzung zur
Sicherheitssteuerung
auch noch eine
Wachsamkeitskontrolle
eingebaut werden.
Diese als «Langsamgang»
bezeichnete
Wachsamkeitskontrolle
wurde erst nach 1 600 Metern aktiv. Nach weiteren 200 Metern kam es
schliesslich zur
Zwangsbremsung.
Dabei erfolgte die Rückstellung mit dem
Pedal,
dem
Fahrschalter
oder einer
Bremse.
Da in der Regel dazu das Pedal benutzt wurde, war es bei der Prüfung nicht
zugelassen. Daher mussten dort andere Methoden benutzt werden. Damit sind
wir aber bereits bei der Bedienung angelangt.
|
|||
| Letzte |
Navigation durch das Thema |
Nächste | |
| Home | SBB - Lokomotiven | BLS - Lokomotiven | Kontakt |
|
Copyright 2019 by Bruno Lämmli Lupfig: Alle Rechte vorbehalten |
|||
 Die
Die
 Obwohl
sich der
Obwohl
sich der  Genutzt
wurden diese drei Stellungen bei der Beschleunigung des
Genutzt
wurden diese drei Stellungen bei der Beschleunigung des
 Auch
beim RBDe 4/4 wurde für die
Auch
beim RBDe 4/4 wurde für die  Bei
Bei
 Die
Dienstbereitschaft des Lokführers war natürlich ebenfalls überwacht
worden. Er musste daher ein in der Nische des
Die
Dienstbereitschaft des Lokführers war natürlich ebenfalls überwacht
worden. Er musste daher ein in der Nische des