|
Spannungsregulierung modern |
|||||
|
Kommen wir zu den modernen Regulierungen der
Spannung
und somit zu den feuchten Träumen der Direktoren. Bei diesen
Regelungen konnte sich letztlich eine Lösung durchsetzen, aber der Weg
dahin wurde schon früher gelegt. Die bisherigen Lösungen zielten immer
darauf ab, dass die aus der
Fahrleitung
stammende Spannung in ihrem Wert verändert wurde, aber dann ohne weitere
Aufbereitung zu den Fahrmotoren geführt wurde. Das galt für alle
Stromsysteme
gleichermassen.
So
bot der
Wechselstrom
eine gute Versorgung und die leichte Anpassung der
Spannung.
Jedoch gab es da den Nachteil mit den Motoren, die nicht optimal waren. Die Lösung mit dem Stufenwähler brachte gute Er-gebnisse. Das Problem hier war, dass die einzelnen Spannungen nur in Schritten erhöht werden konn-ten. Das führte zu ruckartigen Schwankungen bei der Zugkraft.
Man
konnte das zwar immer etwas verbessern, aber die Sprünge blieben und diese
waren nicht nur un-angenehm. Die Sprünge wirkten schädlich auf den Motor
und das musste mit einem recht hohen Auf-wand behoben werden. Bei den Bahnen mit Gleichstrom konnte sich die Choppersteuerung durchsetzen. Diese hatte den grossen Vorteil, dass die Spannung mit so feinen Schritten erhöht wurde, dass keine Sprünge bei der Zugkraft entstanden.
Jedoch funktionierte diese nur mit
Gleichstrom.
Die Maschinen mit
Gleichrichter
machten einen ersten Schritt in diese Richtung, auch wenn dort noch nicht
alle Punkte wirklich optimal gelöst worden waren.
Damit blieb noch der
Drehstrom.
Dieser konnte sich wegen der
Fahrleitung
nicht so richtig durchsetzen. Diese war mühsam im Aufbau und auch die
Regulierung war lange ein Problem. Einzig die hier verwendeten Motoren
waren genial, denn sie konnten auch im Stillstand mit der vollen
Leistung betrieben
werden und das sogar ohne dass es zu Schäden kam. Der Schritt von der
Fahrleitung mit
Wechselstrom
zum Drehstrommotor war jedoch schwer.
|
|||||
|
Die
Stromrichtertechnik war bei Bahnen mit
Gleichstrom
eigentlich schon früh vorhanden. Die dort verwendete Choppersteuerung mit
der Gleichrichtung der
Wechselspannung
führte schon fast zur Stromrichtertechnik. Jedoch sollte eine verbesserte
Lösung umgesetzt werden, denn es sollte ja eine neue Technik dafür benutzt
werden. An Stelle der Impulsregelung trat eine neue Lösung, die auf diese
Impulse verzichten konnte.
Der
Grund dabei ist, dass der
Gleichrichter
lediglich die negative Halbwelle des
Wechselstromes
um-dreht und so Wellen entstehen. Daher auch der da-raus abgeleitete
Begriff Wellenstrom. Um aus Wellenstrom einen echten Gleichstrom zu machen, muss dieser mit einem Bauteil geglättet werden. Dazu werden Kondensatoren und somit elektrische Speicher benutzt.
Diese gaben die aufgenommene Energie ab, wenn diese wieder gegen null
wanderte. Je grösser die
Kapazität dieser
Kondensatoren war, desto besser war die Glättung. Diese hatten jedoch auch
wieder ein Gewicht und das war nicht erwünscht.
Man
arbeitete mit dem Wellenstrom, denn mit diesem konnte man nun mit neuen
Elementen aus dem Bereich der Halbleiter arbeiten. Im Gegensatz zu der
schon bekannten Choppersteuerung erfolgten hier keine Impulse mehr,
sondern man begann die Wellen zu verändern. Diese Wellen werden auch
Phasen genannt und so sind wir bei der ersten modernen Lösung für die
Regulierung der
Spannung
an den Motoren angelangt.
Die Phasenanschnitttechnik:
Willkommen in der Welt der Phasenanschnitttechnik. Bei dieser wird mit
einer
Fahrleitung
mit
Wechselstrom
gearbeitet, denn man benötigte jetzt
den durch die
Gleichrichter
erzeugten Wellenstrom. Das ist auch der Grund, warum Bahnen mit
Gleichstrom
nicht auf diese Steuerung umgestellt werden konnten. Dort hatte man aber
mit der bekannten Impulssteuerung eine Lösung.
Je
mehr davon dem Motor zugeführt wurde, desto schneller konnte er drehen.
Die
Spannung
wurde aber ohne einen Unterbruch zugeführt und das war der grosse Vorteil,
denn die Sprünge waren verschwunden. Das Problem ist aber, dass diese Ausschnitte aus den einzelnen Hügeln bei jedem erfolgen musste. Nur so konnte mit den Anschnitt der Phasen gear-beitet werden.
Das
geht jedoch nur, wenn wir auch den entsprechenden Schalter haben und hier
waren selbst die Hüpfer zu langsam. Der Grund ist, dass dieser je nach
Fahrleitung
in der Sekunde 34 1/3 oder 100 Mal erfolgen musste. Mit anderen Worten in
der doppelten
Frequenz
der Fahrleitung. Der Thyristor war das Bauteil der Elektronik, das schnell genug war und das daher verwendet wurde. Dabei war der Thyristor trotz seinem komplizierten Namen ein einfaches Bauteil. Das
sich sehr gut bei den
Lokomotiven mit dieser Technik
einbauen liess. Es lohnt sich daher, wenn wir den Thyristor etwas genauer
ansehen, denn dieses Bauteil bildet die Grundlage nahezu der gesamten
modernen Regelung der
Zugkraft.
Der
Thyristor ist im Grunde einfach eine Diode. Das heisst, er lässt den
Strom
nur in eine Richtung fliessen und sperrt diesen in der Gegenrichtung. Man
kann daher den Thyristor durchaus auch als Diode verwenden. Da er aber
teurer als die hier verwendeten Dioden ist, werden meistens diese für die
Umwandlung benutzt. Im Gegensatz zur normalen Siliziumdiode kann der
Thyristor aber auch geschaltet werden.
Von
der Halbwelle des Wellenstroms wird der Thyristor ab dem Zeitpunkt der
Zündung die
Spannung
weiterleiten. Man musste nur den Zeitpunkt verändern um die Werte bei den
Motoren zu erhöhen. Der Stromfluss blieb immer erhalten und daher kamen
hier weiterhin die Trennhüpfer zum Einsatz, denn auf diese konnte man
nicht verzichten, auch wenn der Thyristor bei fehlender Zündung sperrte
und so keine Spannung entstand.
Man baute mit den Thyristoren spezielle
Schaltungen auf, die von den Fachleuten Stromrichter genannt wurden. Diese
Stromrichter kombinierten nun den schnellen Schalter mit einem
Gleichrichter. Die negativen Halbwellen wurden nun gedreht. So bekam man
einen Wellenstrom, dessen Phasen angeschnitten werden konnten. Die
Phasenanschnitttechnik war fertig entwickelt und konnte nun verwendet
werden.
Diese Stromrichter werden dabei
korrekterweise auch Thyristorstromrichter genannt. Wobei diese
Präzisierung erst erwähnt wurde, als man damit begann Stromrichter mit
anderen Bauteilen aufzubauen. Wichtig war jedoch bei der
Phasenanschnitttechnik nur der Aufbau dieser Stromrichter, denn man wollte
auch die Anzahl der benötigten Bauteile verringern, denn nur so kann
Gewicht gespart werden.
Eine
Regulierung der
Spannung
für die Motoren mit mehreren Anzapfungen am Transformator war entfal-len.
Man benötigte nur noch die für die Fahrmotoren passende Spannung und
schnitt dabei einfach ab, was für die
Zugkraftt
zu viel war.
Lokomotiven,
die mit diesen Stromrichtern versehen wurden, können stufenlos
beschleunigen. Sie verhalten sich dabei wie Lokomotiven, die bei
Gleichstrom
mit der Choppersteuerung geregelt werden. Der Grund dafür liegt hier beim
Thyristor, denn die Zündung kann sehr feinfühlig verändert werden und so
zündet der Thyristor immer ein wenig früher und stellt so ein klein wenig
mehr
Spannung
zur Verfügung.
Der Fachmann hat dabei den Begriff
Traktionsstromrichter eingeführt. Der Grund liegt einfach bei der
Tatsache, dass Stromrichter einfach überall verwendet wurden, wo
Spannungen
geregelt werden mussten. So kamen Stromrichter auch bei der Ventilation
und bei der
Batterieladung
zur Anwendung. Ich will hier nicht zu weit in diese Bereiche vordringen,
da sie noch behandelt werden.
Nachdem die Thyristorstromrichter den Start in die moderne Regelung
eingeläutet haben, kamen die Entwickler immer zu neuen Ergebnissen. Der
Stromrichter wurde nur noch zu einem Teil benötigt und es kamen auch
spezielle Thyristoren zur Anwendung. Deshalb war der Stromrichtertechnik
nur ein sehr kurzes Leben gegönnt. Als Muster können die
Triebwagen
RBDe
4/4 und die
Lokomotive
Re 4/4
IV genommen werden.
|
|||||
|
Mit
den Stromrichtern hatte man die Stufensprünge abgeschafft und den
Fahrmotor für
Wechselstrom
aus der Traktion von Zügen genommen. Es blieben noch Motoren für
Gleichstrom.
Jedoch hatte auch dieser ein Problem, denn auch er konnte nicht im
Stillstand mit der vollen
Leistung betrieben
werden. Daher sollte der Weg zu den dazu ideal geeigneten Motoren für
Drehstrom
führen. Dazu musste aber die passende
Spannung
her.
Wichtig war eigentlich nur noch die bei
Gleichstrom
vorhandenen Werte bei der
Spannung,
denn diese konnten auch mit der Technik nicht ohne Verluste vermindert
werden. Nur das Problem war wirklich nicht gross. Mit dieser Lösung konnte auch der Motor für Gleich-strom aus der Traktion verdrängt werden. Es sollte in Zukunft nur noch einen Motor geben, den man verwenden kann. Die Versuche in diese Richtung liefen schon seit Jahren und hatten dabei immer mehr Erfolge zu ver-zeichnen.
Man
war auf dem richtigen Weg und das Ziel schien bald erreicht zu sein.
Diesen letzten Schritt wollen wir nun begleiten und so die Technik kennen
lernen.
Will
man einen Motor für
Drehstrom
bei Bahnen mit
Wechselstrom,
oder mit
Gleichstrom
einsetzen, kann man das nicht ohne eine Veränderung der aus den
Fahrleitungen
stammenden
Spannungen.
Bei Fahrleitungen mit Drehstrom hatte man zwar das passende
Stromsystem,
jedoch konnte nun auch das Problem mit den schwer regulierbaren Motoren
gelöst werden. Die Umrichtertechnik war wirklich die Lösung der Probleme.
Man musste
aus
Wechselstrom
einen
Drehstrom machen. Bisher boten sich hier nur die
Umformergruppen an, aber die waren nicht wirtschaftlich genug. Man musste
die
Spannung umformen, ohne dass man auf den Umformer zurückgreifen
musste. Die Lösung hiess letztlich umrichten und nicht umformen. Diese
Lösung dabei war, nicht in einem Schritt zu haben. Wie das gelöst wurde,
sehen wir, wenn wir den Umrichter ansehen.
Diese beiden
Baugruppen wurden sogar gleich auf-gebaut. So konnte der Umrichter die
Spannung in beide Richtungen umwandeln. Damit konnte auch der letzte Teil
der Drehstrommotoren genutzt wer-den. Die Umwandlung von Wechselstrom in Drehstrom erfolgt dabei in zwei Schritten. Man kann diese Umwandlung nicht in einem Schritt ausführen, denn man benötigt eine neutrale Form der Spannung und die fand man beim Gleichstrom.
Der
ist frei vom Sinuswellen und so bestens für den Umrichter
geeignet. Sehen wir uns diese drei Schritte beim Wechsel von
Wechselstrom
auf Dreh-strom etwas genauer an und verstehen so das Problem.
Die
Spannung
aus der
Fahrleitung wurde entweder direkt, oder über einen normalen
Transformator zu einem Stromrichter geführt. Auf diesen konnte man noch
nicht verzichten, da gerade bei
Wechselspannung die Spannungen zu hoch waren.
Bei Fahrleitungen mit
Drehstrom wurde, so komisch das klingen mag auch
dieser erste Schritt vorgenommen. Nur bei
Gleichstrom müssen wir noch
etwas warten, bis der ins Spiel kommt.
Dieser
Stromrichter war jedoch eine Weiterentwicklung des vorher beschriebenen
Thyristorstromrichters und bestand aus anderen Bauteilen, die nicht mehr
mit dem Thyristor verwechselt werden sollten. Dazu kommen wir aber später
noch genauer. Das war auch der Grund, warum man erst später auf diese
Präzisierung dieser Stromrichter kam. Die Aufgabe ist eigentlich identisch
nur eben nicht ganz, denn der Wellenstrom gab es nicht.
Im
Stromrichter wurde mit den verbauten Bauteilen ein echter
Gleichstrom aus
dem Wellenstrom erzeugt. Dazu dienten andere Schaltungen, die
verhinderten, dass die Wellen entstanden. Das ist der grösste Unterschied,
denn hier sollte nicht mehr mit den Phasen gearbeitet werden. Jedoch war
man damit noch nicht am Ziel, denn es sollte ja ein
Drehstrom entstehen.
Aber wir müssen diesen Bereich noch genauer ansehen.
Mit dem
Stromrichter haben wir eine
Gleichspannung erzeugt. Diese musste nun nur
den
Fahrleitungen der Bahnen für dieses Systemen angepasst werden. Es war
die Höhe der
Spannung, die passen musste, denn diese Bahnen liefern somit
den für den nächsten Schritt passenden
Strom. Doch noch fehlt uns der Name
für diesen zwischen den Baugruppen entstehenden
Stromkreis
und da war auch
nicht so viel Phantasie vorhanden.
Die vom Stromrichter abgegebene
Gleichspannung kommt in den Zwischenkreis.
Das ist eigentlich ein geschlossener
Stromkreis. Jedoch muss das nicht so
sein, denn es können auch offene Zwischenkreise verwendet werden und so
kann hier die
Spannung aus den
Fahrleitungen mit
Gleichstrom ohne grosse
Probleme zugeführt werden. Die offenen Zwischenkreise waren so gut, dass
sie sich durchsetzen konnten.
Nötig ist
dieser Zwischenkreis eigentlich nur, weil man in einem Bauteil nicht
direkt aus
Wechselstrom
einen
Drehstrom machen kann. Man benötigt also
diesen Zwischenschritt. So ergab sich der Name. Der Zwischenkreis mit
seiner
Spannung wird bei den offenen Ausführungen für alle anderen
Spannungssysteme genutzt, es muss als nur noch aus dieser
Gleichspannung eine
andere gemacht werden. Doch bleiben wir noch hier.
Jedoch bot sich dort das grosse Problem, dass
die Spann-ung nicht passte. Daher verbaute man einen DC/DC-Wand-ler, der
aber mit den hier üblichen Bauteilen aufgebaut wurde. Andere Lösungen
können aber mit dem nächsten Teil umgesetzt werden.
Der dritte und letzte Schritt beim Umformer ist nur noch der
Wechselrichter. Es handelt sich dabei um einen Stromrichter, der aber aus
Gleichstrom einen
Wechselstrom
erzeugt. Auch wenn ich den Wechselstrom
erwähnt, ältere Umrichter erzeugten direkt einen
Drehstrom, aber diesen
Schritt wurde nicht weiter verfolgt, denn die Wechselrichter konnten
zeitlich verschoben angesteuert werden.
Beim
Wechselrichter liegen die Unterschiede zwischen einem Umrichter und einem
normalen Stromrichter, denn der Umrichter kann im Gegensatz zum normalen
Stromrichter auch
Wechselstrom
erzeugen. Man nennt ihn deshalb
Wechselrichter. Das muss aber nicht immer so sein. Betreibt man den
Umrichter jedoch in die entgegengesetzte Richtung wird aus dem
Stromrichter ein Wechselrichter und umgekehrt. Wir haben eine
bidirektionale
Verbindung erhalten.
Wir wissen
jetzt, wie ein Umrichter grob betrachtet funktioniert und er nicht mit
einem klassischen Stromrichter verglichen werden kann. Dies obwohl
durchaus die gleichen Begriffe verwendet werden. Nur mit was für Bauteilen
arbeitet man denn in einem Umrichter? Der Thyristor des Stromrichters ist
hier, wie ich schon erwähnt habe, schlicht überfordert. Es müssen
spezielle Bauteile her und das waren anfänglich spezielle Thyristoren.
Die Entwicklung der GTO-Thyristoren brachte den endgültigen Durchbruch und
die Umrichtertechnik konnte umgesetzt werden. Diese GTO (Gate Turn Off)
Thyristoren konnten im Gegensatz zu ihren Vorgängern nach dem Zünden zu
einem beliebigen Zeitpunkt wieder gelöscht werden. Beim GTO musste daher
nicht abgewartet werden, bis der Nulldurchgang kam. Dank den
GTO-Thyristoren konnten die ersten Wechselrichter aufgebaut werden.
Die
Schritte, die nötig wurden um eine beliebige
Spannung zu erzeugen, konnte
man nun frei wählen. Es war also nur noch eine Frage, wie man diese
Umrichter ansteuerte. Das ging nur mit Rechnern optimal. Die an die
Motoren abgegebene Spannung war ein
Drehstrom, der ohne grosse Probleme in
der Spannung aber auch in der
Frequenz verändert werden konnte. Dieser
Punkt machte den grossen Vorteil dieser Lösung.
Die
GTO-Thyristoren verwendete man also überall im Umrichter. Für Sie heisst
das, dass der Stromrichter beim Umformer aus GTO- und beim klassischen
Stromrichter aus normalen Thyristoren besteht. Deshalb sagte ich, dass man
den Stromrichter beim Umrichter nicht mit einem normalen
Thyristorstromrichter vergleichen darf. Der Stromrichter beim Umrichter
konnte zudem kippen und so zum Wechselrichter werden. Umgekehrt ging das
natürlich auch.
Er
konnte so sämtliche Vorteile des Motors für Dreh-strom hervorbringen. Der Dabei geformte Wechsel-strom oder Drehstrom hatte zwar leichte
Ecken, aber das spielte bei der Versorgung keine Rolle. Man entwickelte die Technik jedoch immer weiter und so hatten auch die GTO-Thyristoren ausgedient.
Es kamen nun die Transistoren zur Anwendung.
Am Prinzip änderte man jedoch nichts mehr, man war am Ziel und konnte nun
auch bei Bahnen mit
Wechselstrom Motoren für
Drehstrom verwenden. Damit
wir vollständig informiert sind, betrachten wir nun die Lösung mit
Transistoren. Willkommen in der Welt der IGBT.
Den letzten Schritt zur heutigen Technik machte man mit den neuen IGBT
Transistoren. Diese ausgeschrieben
Insulated-Gate-Bipolar-Transistoren genannten Bauteile hatten gegenüber
den bisherigen GTO den Vorteil, dass sie leichter waren und einfacher
gekühlt werden konnten. Ausschlaggebend für den Wechsel war das geringere
Gewicht der IGBT, denn Umrichterlokomotiven waren tendenziell immer zu
schwer geworden.
Bevor wir die IGBT näher betrachten, müssen wir
wissen, was ein Transistor ist. Es handelte sich dabei um ein
Halbleiterbauteil, das zum Steuern und verstärken benutzt wird. Der
Begriff stammt aus dem englischen Sprachraum und wurde aus Transfer und
Resistore gebildet. Dabei sollten wir einen solchen Transistor ansehen,
denn es ist wirklich ein ausgesprochen spannendes Bauteil, das nahezu
überall verwendet wird.
Vereinfacht ausgedrückt wird bei diesem Bauteil mit dem Signal bei der Basis ein Ventil geöffnet, so dass eine elektrische Verbindung zwischen dem Emitter und dem Kollektor geöffnet wird.
So betrieben haben
wir einen elektronischen Schalter er-halten, der extrem schnell arbeiten
konnte. Je nach Aufbau können jedoch Transistoren positive Sig-nale, aber auch negative Impulse nutzen. Die grosse Ver-breitung macht die Bauteile billig und so kommen diese Transistoren nahezu in jeder elektronischen Schaltung vor.
Dabei können die Bauteile so schnell
schalten, dass sie un-schlagbar sind. Ihr extrem schneller Computer ist das
Bei-spiel, denn im Prozessor sind zahlreichen Transistoren verbaut worden.
In einer speziellen Schaltung mit mehreren
Transistoren können die Signale verstärkt werden. Diese Schaltung wird
Schwingkreis genannt, weil sich die Transistoren aufschwingen können und
so ein verändertes Signal erzeugen. Selbst die Erhöhung von
Frequenzen aus
dem
Wechselstrom sind kein Problem. Das alte Radio in der Werkstatt
arbeitet vermutlich nach diesem Prinzip, aber auch ein moderner Umrichter
mit IBGT.
So konnte man nun auch das Gewicht bei vergleichbarer
Leistung einhalten. Dabei arbeitet der Transistor beim IGBT ähnlich wie
der Thyristor. Nur vereinfachten die IGBT den Aufbau der
Lokomotiven und
so auch den Aufwand, den man betreiben musste, um eine Lokomotive für
mehrere Stromssysteme zu bauen. Bei mit IGBT ausgerüsteten Lokomotiven ist
die universale Spannungsversorgung eigentlich schon automatisch vorhanden.
Es spielte keine Rolle mehr, was im
Fahrdraht
für eine
Spannung vorhanden war. Die seltenen
Fahrleitungen
von Drehstrom verhinderten, dass man wirklich sämtliche
Stromsysteme
einspeisen konnte. Wer nun einen Blick in die Kristallkugel werfen möchte, der hat bei einem Umrichter mit IGBT keine grossen Optionen mehr. Jedoch ist man eigentlich immer noch nicht am Ziel angelangt.
Das ist, eine weitere Reduktion
beim Gewicht, denn das ist einfach sehr hoch, besonders dann, wenn man
gigantische
Leistungen umsetzen will. Ein Ansatzpunkt wäre in dem Fall
eigentlich nur noch der bei
Wechselstrom benötigte Trans-formator. Will man auf dieses schwere Bauteil verzichten, dann muss der Stromrichter für Spannungen bis 25 000 Volt ausgelegt werden.
Das ist ein grosses Schritt,
der auch nicht mehr viel bringen würde, denn mit der Technik ist man
bereits an dem Punkt angelangt, bei dem nicht noch höhere
Zugkräfte auf
die
Schienen übertragen werden können. Aber bei
Triebzügen könnte der
Platz für den Transformator auch genutzt werden.
Der
Umrichter konnte je nach Wunsch mit Wechsel- oder
Gleichstrom betrieben
werden. Die
Spannung stellte man im Zwischenkreis ein und so hatte man
alles, was man benötigte. Es fehlen eigentlich nur noch die Muster für
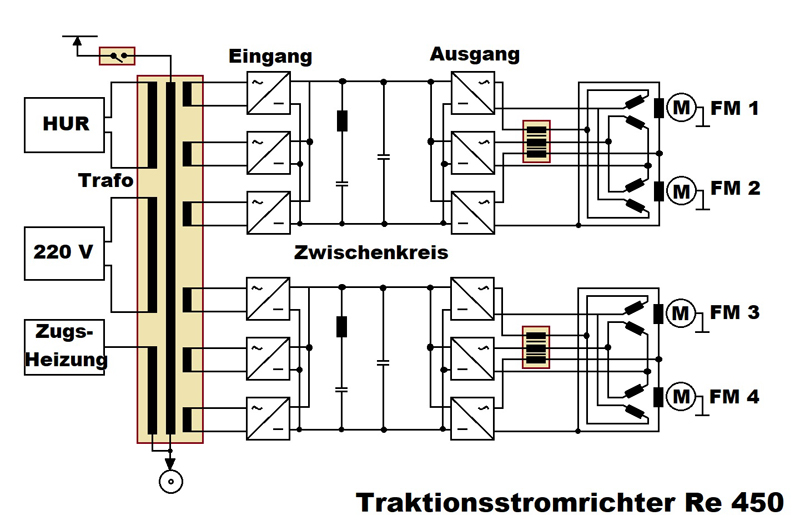
diese Lösung und die findet sich wirklich schnell. Mit GTO aufgebaut
wurden die
Baureihen
Re 450 und
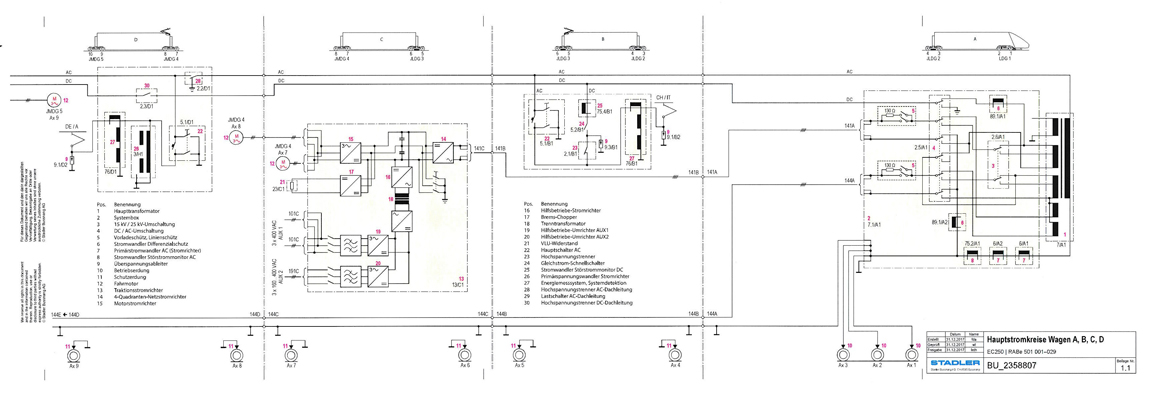
Re 460. Bei den IGBT können Sie sich bei
den Baureihen
RABDe 502, oder
RABe 501 orientieren.
|
|||||
| Zurück | Navigation durch das Thema | Weiter | |||
| Home | Depots im Wandel der Zeit | Die Gotthardbahn | |||
| News | Fachbegriffe | Die Lötschbergbahn | |||
| Übersicht der Signale | Links | Geschichte der Alpenbahnen | |||
| Die Lokomotivführer | Lokführergeschichte | Kontakt | |||
|
Copyright 2026 by Bruno Lämmli Lupfig: Alle Rechte vorbehalten |
|||||
 Dabei
zeigten sich bei allen drei
Dabei
zeigten sich bei allen drei

 Um
Ihnen die Phasenanschnitttechnik vorzustellen, müssen Sie sich zuerst den
Wellenstrom als eine Abfolge von einzelnen Hügeln vorstellen. Mit diesen
Hügeln und der darin enthaltenen Energie arbeiten wir nun.
Um
Ihnen die Phasenanschnitttechnik vorzustellen, müssen Sie sich zuerst den
Wellenstrom als eine Abfolge von einzelnen Hügeln vorstellen. Mit diesen
Hügeln und der darin enthaltenen Energie arbeiten wir nun.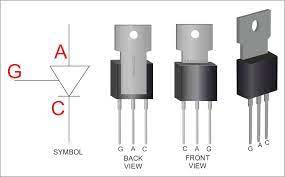 Das
heisst, er wird erst leitend, wenn er durch ein Signal gezündet wird.
Dreht die Richtung des
Das
heisst, er wird erst leitend, wenn er durch ein Signal gezündet wird.
Dreht die Richtung des
 Es
kommen daher in einem Thyristorstromrichter im-mer mehrere Thyristoren zur
Anwendung. Aufgebaut werden sie dabei als normale Brückenschaltung, wie
bei den Dioden.
Es
kommen daher in einem Thyristorstromrichter im-mer mehrere Thyristoren zur
Anwendung. Aufgebaut werden sie dabei als normale Brückenschaltung, wie
bei den Dioden. Auch
wenn wir nun die Umrichtertechnik anhand einer Lösung für
Auch
wenn wir nun die Umrichtertechnik anhand einer Lösung für
 Die
Die
 Betrieb man
den GTO als Wechselrichter, schaltet man den GTO in Bruchteilen von
Sekunden aus und wieder ein. Dadurch konnte man nun mit definierten
Schaltfolgen einen Wechselrichter aufbauen, der eine variable
Betrieb man
den GTO als Wechselrichter, schaltet man den GTO in Bruchteilen von
Sekunden aus und wieder ein. Dadurch konnte man nun mit definierten
Schaltfolgen einen Wechselrichter aufbauen, der eine variable
 Es muss nur noch die Software angepasst werden. Man
war am Ziel angelangt und hatte nun die Umformung und Dreh-strommotoren.
Es muss nur noch die Software angepasst werden. Man
war am Ziel angelangt und hatte nun die Umformung und Dreh-strommotoren.