|
Die Triebmotoren |
|||||
|
Bisher haben wir alles nur für einen Zweck getan. Wir haben mit
viel Aufwand eine veränderbare
Spannung
geschaffen, die wir nun einem Motor zuführen können. Damit sind wir nun
bei diesen angelangt und dabei stellt sich eigentlich nur die Frage, warum
sie den so genannt wurden. Motoren sind Geräte, bei denen eine drehende
Bewegung erzeugt wird. Das kann mit
Strom
oder durch Verbrennung erfolgen.
In der Folge werden wir uns diese Teile etwas genauer an-sehen,
denn eines ist sicher, es gibt ihn nicht, den einzig richtigen Motor.
Jeder hat so seine Macken und manche konnten schlicht keine Freunde
finden. Genau diese Motoren wollen wir nun ansehen, denn diese sorgen letztlich dafür, dass sich die Lokomotive bewegen kann. Die ersten verbauten Motoren können dabei nicht mehr mit den heute verwendeten Exemplaren verglichen werden.
Diese können mehr leisten und sind erst noch viel kleiner geworden. Es ist
deshalb angebracht, dass wir nun diese Triebmotoren genauer ansehen. Nur
so können wir auch deren Funktion kennen lernen. Mit der Art der Regulierung und der Fahrleitungsspannung war auch der zu verwendende Motor vorgegeben. Baute man eine Lokomotive für Wechselstrom und regelte die Spannung mit Hüpfern war eines klar. Hier
wurde der Motor ebenfalls mit
Wechselstrom
be-trieben. War ein Gleichrichter dazwischen geschaltet, kam ein Motor für
Gleichstrom
zur Anwendung. Bei
Drehstrom
gab es wieder ein anderes Modell.
Deshalb gibt es diese drei Grundtypen. Damit Sie etwas überrascht sind,
stelle ich die Motoren so vor, wie sie auch erschienen sind. Damit lernen
wir auch etwas über die Entstehung dieser Motoren kennen. Daher darf ich
Sie nun in der Welt der elektrischen Motoren begrüssen. Was Sie hier über
den Motor einer
Lokomotive kennen
lernen, gilt eigentlich auch für den Motor in Ihrem Mixer. Der Aufbau ist
identisch. Doch nun zum ersten Motor.
|
|||||
| Der Gleichstrommotor | |||||
|
Nun, man könnte sich elegant aus der Affäre schummeln, wenn man behaupten
würde, dass der gleiche Motor bei Gleich- und
Wechselstrom
verwendet wird. Das ist wirklich zu einfach um wahr zu sein. Aber es ist
genau das, was stimmt, denn ein Wechselstrommotor könnte man unter
Gleichstrom
betreiben. Umgekehrt ist das jedoch nicht möglich. Daher haben wir einen
Unterschied, den wir noch kennen lernen werden.
Doch dazu später etwas mehr. Die Motoren für
Gleichstrom
funktionierten und so konnte man die ersten elektrischen Loko-motiven
damit betreiben. Das hatte auch Auswirkungen auf den Bau der
Fahrleitungen. Die Entwicklung der Motoren für Gleichstrom war eine Arbeit von mehreren Leuten. 1860 wurde der erste funktionierende Motor für Gleichstrom gebaut. 1872 verbesserte man diesen Motor, so dass er die Form erhalten hat, die ich hier nun vorstellen werde.
Letztlich fuhr 1879 der erste Zug, der von einer elektrischen
Lokomotive gezogen
wurde. Sie sehen, der Motor kam sehr schnell zur Eisenbahn und sorgte dort
für Bewegung. Letztlich wurde dieser Motor von Friedrich Franz Heinrich Phillip von Hefner-Altenbeck erschaffen. Von Hefner-Altenbeck wurde am 27. April 1848 bei Aschaffenburg geboren. Er entwickelte zusammen mit Werner von Siemens den Kollektor und somit den hier vorgestellten Motor. Es überrascht daher wenig, dass von Siemens mit dem ersten elektrischen Zug fuhr. Von Hefner-Altenbeck verstarb am 6. Januar 1904 auf dem privaten Gut Biesdorf.
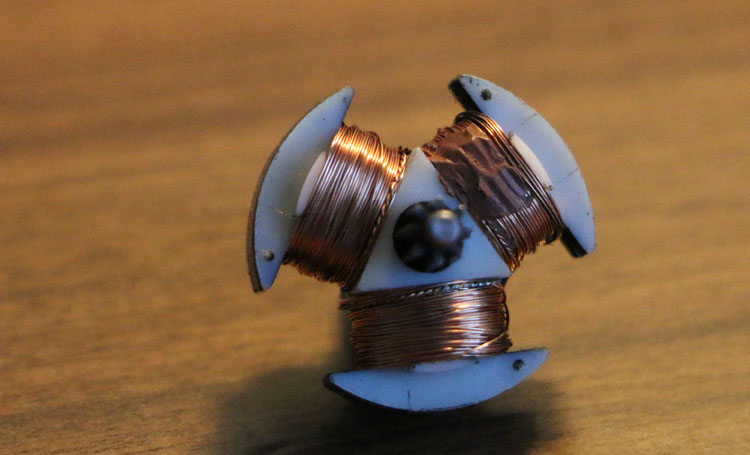
Doch schauen wir uns diesen Gleichstrommotor etwas genauer an. Das erste
was uns dabei auffällt, ist, dass der Motor aus zwei unterschiedlichen
Bauteilen besteht und letztlich nur zu einem davon Kabel geführt werden.
Dabei fällt auch auf, dass keine Kabel zu dem fest stehenden Teil des
Motors führen und nur das drehende Bauteil angeschlossen wird. Doch damit
wir die Funktion besser kennen lernen, beginnen wir mit dem stehenden
Teil, dem Stator.
Beim Modell für den
Gleichstrom
kommen stark magnetische Bauteile beim Stator zur Anwendung. Die Bauteile
bestehen aus magnetisiertem Eisen. Eine Entmag-netisierung dieses Eisens
ist jedoch nicht vorgesehen. Dieses durch den magnetischen Eisenkern des Stators erzeugte Magnetfeld, hat wie jedes Magnetfeld zwei Pole. So ist auf einer Seite der Pluspol und ihm gegenüber befindet sich der Negativpol.
Bei
einem einfachen Motor reicht das aus. Jedoch kann man diese Pole beliebig
erweitern und erhält so eine mehrpolige Version. Entscheidend ist, dass es
immer die beiden Pole sind und sich diese richtig anordnen. Sie werden es mir vermutlich nicht glauben, aber bei Gleichstrommotoren haben sich die Lösungen mit einem zweipoligen und daher speziell geformten Stator durchgesetzt.
Daher ist der Stator nahezu beliebig formbar, was den Aufbau bei den
primitiven Werkzeugen von früher vereinfachte, daher kam es zur Situation,
dass dieser Motor als erstes entwickelt wurde. Die restlichen Motoren
waren etwas aufwendiger zum Bauen.
Mehr gibt es eigentlich zum Stator nicht zu sagen, denn klassisch
aufgebaute Gleichstrommotoren arbeiten mit diesen festen Bauteilen. Eine
weitere Lösung mit Spulen wird hier nicht benötigt, da man bei
Gleichstrom
eine feste Polarisierung hat und sich so ein festes Magnetfeld aufbauen
würde. Daher wird der Stator sehr einfach aufgebaut und zeigt so
eigentlich die Einfachheit dieses Motors auf. Wichtig ist, dass sich Plus
und Minus immer gegenüber stehen.
Es
ist daher ein universeller Begriff, der sich auch bei den Motoren und
deren Bezeichnung durchsetzen konnte. Am Rotor wird die Welle
angeschlossen, welche schliesslich den
Antrieb
versorgte. Der Rotor wird beim Gleichstrommotor als einziges Bau-teil elektrisch versorgt. Dadurch wird die im Rotor befind-liche Spule elektrisch erregt und es entsteht ein Magnet-feld.
Dieses Magnetfeld baut sich, ähnlich wie beim Trans-formator, je nach
Polung der Leiter auf und führt daher zur Lösung. Die Polung zum Stator
ist so, dass sich die positiven und negativen Pole gegenüberstehen. Somit
wollen sich diese Magnetfelder abstossen.
Das
macht der Motor auch, weil der Rotor beweglich ist. Jedoch würde die
Polung nach einer halben Umdrehung wieder stimmen. Daher müssen wir nun
dafür sorgen, dass sich die Spule mit ihrem Magnetfeld wieder in die
ursprüngliche Richtung umpolt. Nach dieser Umpolung haben wir wieder den
ursprünglichen Zustand und der Motor dreht sich wiederum eine halbe
Umdrehung. Wenn nun die Umpolung im Rotor dauernd ändert, beginnt sich der
Rotor zu drehen.
Der Kollektor:
Damit die Polung im Rotor immer abstossend ist, besitzt der Rotor die
Anschlüsse an einer zylindrischen Trommel. Diese Trommel nennt man
korrekterweise Kollektor. In dem Kollektor werden die Anschlüsse der
Spulen so gelegt, dass diese so ausgerichtet sind, dass der Rotor immer
eine abstossende Polung hat. Der Rotor kann sich nun innerhalb des Stators
drehen und so die Welle in Bewegung setzen. Er erreicht nie die passende
Polung.
Die Leitungen, die zum Motor führen, werden am
Kollektor über zwei Bürsten angeschlossen. Dieser Begriff hat mit den
Bürsten, die Sie vielleicht zum Schuhe reinigen benötigen, nichts zu tun.
Der Name kommt daher, dass diese Bauteile über den Kollektor gleiten und
diesen so immer schön sauber und blank halten. Daher reinigen sie den
Kollektor und werden deshalb als Bürste bezeichnet. Optisch unterscheiden
sie sich jedoch.
Es
handelt sich beim Material für die Bürste meistens um
Kohle,
es können aber auch Geflechte aus Metall verwendet werden. Die Kohle ist
weicher als der Kollektor und so wird die Abnützung an der Kohle erfolgen.
Das führte dazu, dass sich der Anschluss mit Kohle durchsetzen konnte.
Damit ist unser Motor richtig angeschlossen und kann sich nun frei drehen.
Diese Bewegung überträgt sich auf die Welle und wir können den
Antrieb bewegen.
Eine Gefahr für die Kollektoren sind
die Bürstenfeuer. Durch Schäden entstehen Funken zwischen den einzelnen
Lamellen. Durch die schnelle Drehung kann sich so ein Funke auf den ganzen
Umgang ausdehnen. Dadurch entsteht ein
Lichtbogen,
der als Bürstenfeuer bezeichnet wird. Die Bürstenfeuer können den Motor
beschädigen und daher haben wir hier sehr präzise gearbeitete Teile
erhalten.
Das
Magnetfeld im Rotor will sich immer an dem Magnetfeld des Stators
ausrichten. Stimmt das nicht, dreht sich der Rotor so lange, bis es
stimmt. Die Bürsten am Kollektor werden dadurch umgepolt und der gedrehte
Rotor hat wiederum ein falsches Magnetfeld und muss sich wieder neu
ausrichten. Das geht unendlich so weiter und der Rotor beginnt sich zu
drehen, denn er erreicht die gewünschte Position nie.
Das
ist reiner Zufall und kann weder durch den
Strom
noch durch die
Spannung
beeinflusst werden. Der Grund ist klar, der Rotor nimmt den kürzesten Weg
um sich auszurichten. Der Motor ist für den Gebrauch deshalb noch
ungeeignet.
Bestimmung der Drehrichtung:
Bei kleinen Motoren löst man das mit einer simplen aber gut
funktionierenden Lösung. Man hat bei den Rotoren eine ungerade Anzahl
Pole. Diese sind so geschaltet, dass immer der Pol der in Richtung des
Stators steht, eine abweisende Polung hat. Der Motor muss sich dadurch
drehen. Die anderen Pole sind so gepolt, dass sie sich entweder um
Positiven, oder vom negativen Pol abstossen.
Der
Motor erhält dadurch eine vorgegebene Drehrichtung. Diese kann sogar auf
einfache Art geändert werden, denn der Rotor richtet sich im Magnetfeld
immer auf die Grundpolung des Metalls aus. Die Drehrichtung wird dadurch
durch die beiden nicht exakt ausgerichtet Pole vorgegeben. Polt man nun
den Anschluss um, dreht der Motor in die andere Richtung. Der Motor
funktioniert und kann sich in zwei Richtungen drehen.
Die Lösung mit den ungeraden Polen beim Rotor
funktioniert recht gut. Jedoch kann man die Angelegenheit auch mit einer
Spule beim Stator lösen. Diese Spule nennt man Wendepol. Dieser Wendepol
steht leicht verschoben seitlich neben den Polen des Stators. Dadurch wird
dem Rotor die Drehrichtung je nach Polung im Wendepol aufgezwungen. Wir
können die Drehrichtung mit dem Wendepol bestimmen.
Die
Drehrichtung konnte man ebenfalls nach belieben wählen und so war es
schnell klar, dass solche Motoren im grösseren Stil gebaut wurden. Dabei
waren eigentlich nur die Kollektoren und das Bürstenfeuer ein grosses
Problem. Der Wellenstrommotor: Bisher haben wir die Funktion des Motors unter den Beding-ungen mit einem einfachen kontinuierlichen Gleichstrom betrachtet. Ist dieser jedoch aus einer üblichen Gleichrichtung von Wechselstrom entstanden. Hier
bilden sich Wellen, da die Halbwellen der
Sinuskurve
bleiben. Da dieser Motor nun auch mit diesen Wellen betrieben werden kann,
bezeichnet man diesen Motor Wellenstrommotor.
Der
Motor ist aber ein normaler Gleichstrommotor und könnte durchaus auch mit
geglättetem
Gleichstrom
betrieben werden. Die Unterschiede zu unserem sehr einfach aufgebauten
Motor sind überraschend gering. Wir haben nämlich mit dem Aufbau dieses
Gleichstrommotors nichts anderes als einen Wellenstrommotor aufgebaut. Die
Entwicklung dieser Motoren blieb natürlich nicht stehen und so gab es
immer besser funktionierende Motoren für Gleichstrom.
Nur, kamen schon sehr bald neue und viel bessere Motoren auf den Markt.
Noch wusste man damals nicht, dass man damit den perfekten Motor
geschaffen hatte. Die Regelung bei den ersten Modellen war zwar schwer,
aber man setzte diese Motoren bei der Eisenbahn ein und fuhr damit Züge.
Ich spreche von den Motoren, die für den Betrieb unter
Drehstrom
gebaut wurden. Denn die kamen nach den Motoren für
Gleichstrom. |
|||||
| Der Drehstrommotor | |||||
|
Nach den Erfolgen mit den Gleichstrommotoren und mit den dazu passenden
Strecken, begann sich der
Drehstrom
zu entwickeln. Hier gelang es einen funktionierenden Generator zu bauen.
Damit konnten nun auch erste Netze mit Drehstrom aufgebaut werden. Was man
jedoch noch nicht wusste war die Tatsache, dass man damit eigentlich auch
schon den ersten Drehstrommotor entwickelt hatte.
Das mag stimmen, nur muss man klar wissen, dass dies nicht für jeden Drehstrommotor gilt.
Das
mag überraschen, denn es gibt nur drei Grundtypen und davon soll nur einer
gänzlich ohne Wartung auskom-men. Ob das stimmt? Wir müssen hinsehen.
Wenn wir die drei Varianten bei den Drehstrommotoren ansehen wollen,
müssen wir, ob wir wollen oder nicht, auch den Weg durch die Geschichte
nehmen. Dabei stellt man fest, dass diese drei Motoren innerhalb von zwei
Jahren entwickelt wurden. Beginnen wir deshalb mit dem etwas älteren
Modell der Motoren für
Drehstrom
und kommen dann erst zum besseren Modell. Sehen wir uns nun den
Synchronmotor an. Der Synchronmotor: Eigentlich dürften wir hier gar nicht von einem Motor sprechen, denn man kann auch von einer Synchronmaschine sprechen. Der Grund ist simpel, denn die genau gleichen Schaltungen werden auch bei einem Generator im Kraftwerk verwendet. Man kann diese Maschine daher sowohl als Motor, als auch als Generator verwenden. Änderungen an der Konstruktion sind dazu nicht einmal nötig. Doch wie kam es zu dem Motor?
Die
Synchronmaschine wurde von Charles Eugene Lancelot Brown 1887 entwickelt.
Charles Brown wurde am 17. Juni 1863 in Winterthur geboren. Brown
entwickelte die ersten Drehstrommaschinen weiter und verbesserte sie so.
Zusammen mit Boveri bildete Charles Brown das erste B der Firma BBC,
welche für Brown, Boveri und Cie steht. Charles Eugene Lancelot Brown
verstarb am 2. Mai 1924 in Montagnola (Kanton Tessin).
Sie
wissen, dass dies bei
Wechselstrom
nur für einen kurzen Moment der Fall ist. Das Stichwort dabei lautet
Sinuskurve.
So erhält die Spule 1 bei 0° die maximale
Spannung,
Spule 2 erst bei 120° und letztlich Spule drei bei 240°. Bei 360°, haben wir wieder Null erreicht und es beginnt wieder von vorne. Es entsteht ein Drehfeld. Dieses Drehfeld wird im Rotor ebenfalls erzeugt. Damit sind auch hier auf dem Rotor Spulen vorhanden.
Wir
haben also nun einen Motor, der an beiden Stellen eine Spule hat und daher
ebenfalls einen Kollektor, der durch Brown auf dem
Zylinder
ange-ordnet wurde. Die Beschaltung in den Spulen ist so ausgelegt worden,
dass sie dem Drehfeld des Stators synchronisiert folgten.
Deshalb spricht man hier von einer Synchronmaschine. Diese Synchronmotoren
erzeugten automatisch Energie, wenn der Rotor bewegt wurde. Sie werden so
zum Generator. Synchronmaschinen benötigen weiterhin einen Kollektor, denn
nur so ist der saubere synchronisierte Betrieb möglich. Deshalb können
Synchronmotoren nicht ohne Wartung auskommen, denn die Bürsten müssen
regelmässig kontrolliert und erneuert werden.
Der Asynchronmotor:
Beim Asynchronmotor handelt es ich um eine Weiterentwicklung der
Synchronmaschine. Der am 2. Januar 1862 in Gattschina Russland geborene
Michail Ossipowitsch Doliwo-Dobrowolski entwickelte den Asynchronmotor
1889. Damit schuf er schlicht den perfekten Motor. Doliwo-Dobrowolski
verstarb am 15. November 1919 in Heidelberg. Er hinterliess uns den besten
Motor, den es gibt.
Bei
einem Asynchronmotor befindet sich das dauernde Magnetfeld nicht im
Stator, sondern im Rotor. Sie haben richtig gelesen, das permanente
Magnetfeld finden wir nun im Rotor. Dadurch benö-tigen wir keine
Anschlüsse mehr.
Der Rotor wird beim Asynchronmotor auch
Kurzschlussläufer genannt. Dieser etwas anders lautende Begriff erklärt
deutlich, dass im Rotor ein unter
Kurzschluss
stehendes Magnetfeld ent-steht. Hier liegt auch der Grund für die
Bezeichnung des Motors, denn es entsteht eine kleine Verzögerung und der
Rotor folgt dem Drehfeld nun etwas verzögert. Er läuft nicht synchron mit
dem Drehfeld und ist daher eben asynchron, was dem Motor den Namen gab. Beim Asynchronmotor versucht nun der mit einem dauernden Magnetfeld versehene Rotor dem Drehfeld zu folgen. So beginnt er automatisch zu drehen. Fehlt eine der Spulen, weiss der Rotor nicht in welche Richtung er drehen muss. Der Motor beginnt zu brummen, bewegt sich aber nicht und lässt sich auch nicht mehr bewegen, denn wegen der fehlenden dritten Spule fehlt das Drehfeld. Der Rotor richtet sich daher immer gleich aus.
Um
den Vorteil des Asynchronmotors aufzuzeigen, müssen wir etwas ausholen.
Bei jedem Motor, auch bei dem noch ausstehenden Wechselstrommotor, besteht
das Hauptproblem beim Kollektor. Ein Kontakt im Kollektor wird immer nur
sehr kurz mit dem maximalen
Strom
belastet, weil sich der Rotor dreht. Steht der Rotor ist der Kontakt
dauernd belastet. Jetzt fliesst ein hoher Strom über die gleiche Stelle
und der Kollektor wird beschädigt.
Das
erfolgt sogar automatisch, wenn sich der Rotor schneller dreht, als das
Drehfeld. Der Motor schaltet automatisch um und muss daher um korrekt zu
sein, als Asynchronmaschine bezeichnet werden. Doch sehen wir uns nun den
dritten Motor an. Permanentmagnetmotor: Beim Permanentmagnetmo-tor geht man noch einen Schritt weiter. Während beim Asynchronmotor Spulen benötigt wurden, die im Kurzschluss liefen, wurden nun diese durch dauer-hafte Magnete ersetzt.
Diese hatten auf den Rotor den gleichen Einfluss, denn bedingt durch den
Schlupf eilt der Rotor dem Drehfeld etwas nach. Es ist also der gleiche
Effekt vorhanden und trotzdem ein eigener Motor.
Mit
den Magneten, die im Rotor montiert wurden, konnte die Standfähigkeit
etwas erhöht werden. Was aber der grösste Vorteil dieser Motoren ist, ist
die Baugrösse. Im Vergleich zu einem Asynchronmotor, kann diese Lösung bei
gleicher
Leistung deutlich
kleiner und damit auch leichter gebaut werden. Auch dieser Motor benötigt
kaum Unterhalt und sie sind auch mit Flüssigkeiten kühl bar, was die
anderen Lösungen nicht kannten.
Der Drehstromfahrmotor:
Als Drehstromfahrmotoren für
Triebfahrzeuge
werden sowohl Synchronmaschinen, als auch Asynchronmaschinen verwendet.
Die neuen Permanentmagnetmotoren können sich hier natürlich auch
einreihen. Alle Motoren bieten bei der Eisenbahn den Vorteil, dass sie
automatisch und ohne eine Änderung der Verdrahtung von einem Motor zu
einem Generator werden können.
Man
kann sogar behaupten, dass der Asynchronmotor der ideale
Drehstromfahrmotor ist. Er kann im Stillstand mit der vollen
Leistung ohne Schaden
betrieben werden und ist des-halb gut für Triebmotoren geeignet. Zudem ist bei dem Fahrmotor keine regelmässige Wartung nötig, was ihn im Unterhalt unschlagbar macht. Das Pro-blem beim Asynchronmotor ist, dass man diesen Motor nicht mit einphasigem Wechselstrom betreiben kann.
Man
musste zuerst eine Lösung dafür finden, bis man den Motor einsetzen
konnte. Das schaffte erst die moderne Technik mit den Umrichtern. Diese
können auch die neuen Modelle ideal ansteuern. Elektrisch gesehen bietet der Permanentmagnetmotor keinen Vorteil. Jedoch spricht seine geringe Grösse für ihn und da er einfacher im Aufbau ist, kann er auch billiger angeboten werden.
Letztlich ist auch dieser Motor sehr mit den älteren Asynchronmotoren
verwandt. Es gibt keinen einfacheren Aufbau mehr, als das beim
Permanentmagnetmotor der Fall ist. Es ist wirklich nur noch im Drehfeld
teurer Kupfer verbaut.
Die
schwere Regelung der ersten Fahrmotoren führte dazu, dass man
Lokomotiven, die mit
Wechselstrom
betrieben wurden, mit speziellen für dieses System entwickelten Motoren
ausrüstete. Noch wusste man nicht, dass man aus der Synchronmaschine auch
einphasige Modelle bauen kann. Die
Lokomotiven wurden
daher mit den Motoren für Wechselstrom ausgerüstet. Daher sollten wir nun
diesen Motor für Wechselstrom ansehen. |
|||||
| Der Wechselstrommotor | |||||
|
Willkommen in der wunderbaren Welt des Wechselstrommotors. Wir befinden
uns nun bei einem der häufigsten Motoren die es überhaupt gibt. Ich
behaupte einfach mal frech, dass es bei Ihnen zu Hause einen
Wechselstrommotor gibt. Dabei werde ich vermutlich nicht mal falsch
liegen, denn wer hat keinen Staubsauger? Genau, dort ist ein ganz normaler
Wechselstrommotor eingebaut worden. Jedoch hatte er eine spannende
Geschichte, die wir ansehen wollen.
Diesen Motor fand man schliesslich überraschend einfach. Man hatte ihn
schon, wusste aber nicht, dass dem so war. Es wurden neue Ideen
verwirk-licht, die sich letztlich nicht durchsetzen konnten, weil der
Motor schlicht zu kompliziert war. Doch warum brauchte der Wechselstrommotor so lange, bis er entwickelt war? Man wusste beim Wechselstrom nicht, wie man die Probleme mit dem wechselnden Feld lösen konnte.
Beim Motor für
Gleichstrom
hatte man das Problem nicht und beim
Drehstrom
konnte man mit einem Drehfeld arbeiten. Doch dort wusste man auch noch
nicht, dass man den Motor leicht anpassen kann und dann einen Motor für
Wechselstrom
hat.
Es
war schliesslich die Entdeckung, dass man den Motor für
Gleichstrom
anpassen konnte. Beide Teile, sowohl Stator, als auch Rotor mussten dabei
mit einer Spule versehen sein. Schloss man die Spulen danach richtig an,
hatte man einen einfachen und gut funktionierenden Motor. Genial war aber,
dass dieser Motor weiterhin für Gleichstrom geeignet war. Man hatte einen
Universalmotor, der sich Induktionsmotor nannte, erschaffen.
Der Induktionsmotor wurde später zu
einem Seriemotor. Jedoch war der Induktionsmotor mit zwei verbundenen
Spulen längst nicht die Lösung aller Probleme. So gab es auch andere
Lösungen, die sich aber bei den Bahnen kaum durchsetzen konnten. Sehen wir
und daher diesen Induktionsmotor etwas genauer an. Dabei muss nicht mehr
alles neue erwähnt werden, denn Sie fanden es schon beim
Gleichstrom.
Seriemotor nennt man diesen Motor, weil die Spulen im Stator und im Rotor
in Serie geschaltet wurden. Der wei-tere Aufbau entsprach hingegen dem
Gleichstrommotor, wie wir ihn schon kennen gelernt haben. Den Seriemotor nennt man auch Reihenschlussmotor. Die-ser Name entstand, weil die Spulen statt in Serie, in Reihe geschaltet wurden. Es ist daher einfach eine etwas deutschere Version des Namens.
Doch sehen wir uns nun diesen Motor mit zwei Spulen, die in Reihe
angeschlossen werden, etwas genauer an. Dabei lernen wir den Seriemotor
oder Reihenschlussmotor ken-nen und erfahren dann auch gleich, warum er
auch bei
Gleichstrom
funktioniert. Der Durchbruch bei diesem Reihenschlussmotor gelang Ni-kola Tesla. Damit hatte man einen funktionierenden und einfachen Motor erhalten. Was dann jedoch passierte, grenzt an ein Wunder. Der
neu erfundene Wechselstrommotor wurde in eine Lo-komotive eingebaut. Die
erste
Lokomotive mit
Triebmotoren für
Wechselstrom,
kam dann nur kurze Zeit später auf der Strecke zwischen Seebach und
Wettingen zum Einsatz.
Die
beiden Spulen waren, wie es der Name schon sagt, einfach in Reihe
geschaltet und so miteinander verbunden worden. Darin lag das Geheimnis
dieses Motors. Die
Spannung
wurde dabei durch die Spule im Stator geleitet. So entstand dort das
gewünschte Magnetfeld, der zweite Anschluss wurde zum Kollektor geführt
und so an die Spule im Rotor angeschlossen. Danach ging es über den
Kollektor zurück zum
Kraftwerk.
Das
war die schlichte Schaltung der Reihenschlussmotoren, die eigentlich nicht
mehr benötigten. Für die Änderung der Drehrichtung hatte man auch hier
zwei Lösungen. Man konnte einen separaten Wendepol, wie beim Motor für
Gleichstrom
verwenden. Mit einer ungeraden Anzahl Spulen im Rotor musste jedoch die
Spule des Stator umgekehrt angeschlossen werden. Dann dreht der Motor in
die andere Richtung.
Dabei hatte der Reihenschlussmotor aber auch seine Vor- und Nachteile. Der
Vorteil lag dabei klar in seinem stabilen Verhalten bei
Kurzschlüssen.
Bei einem Kurzschluss war er kaum zu zerstören und war deshalb gut für die
Eisenbahn geeignet. Entstand ein Kurzschluss, schaltete die
Lokomotive zwar aus,
es kam aber nicht zu zusätzlichen Schäden am Fahrmotor. Die Reparatur
konnte sich so nur auf den betroffenen Bereich beschränken.
Der
Nachteil des Seriemotors lag aber beim unbelasteten Motor. War der Motor
ohne Last, begann er immer schneller zu drehen, dabei erreichte der Motor
Drehzahlen, die durch den Kollektor nicht mehr beherrscht werden konnten.
Der Kollektor flog buchstäblich auseinander und der Motor wurde zerstört.
So musste man frei drehende
Räder
bei der Eisenbahn um jeden Preis verhindern. Das ging aber nicht so
einfach, wie man meinen könnte.
Dieser Wechselstrommotor war letztlich der Motor, der sich bei der
Eisenbahn durchsetzen konnte. Viele
Lokomotiven waren
damit ausgerüstet worden. So fand man schliesslich vom Gleichstrommotor
über den Drehstrommotor den Weg zum Wechselstrommotor. Es war aber nicht
die einzige Lösung und es gab noch ein weiteres Modell, das verwendet
wurde, das so langsam lief, dass es keine
Getriebe brauchte.
Wie
beim Seriemotor, konnte auch aus diesen Modellen ein Exemplar für
Wechselstrom
gewonnen werden. Es lohnt sich, wenn wir genauer hinsehen und dabei
betrachten wir die Lösungen nach Miksa Déri, die bei der Rhätischen Bahn
RhB zur Anwendung kam. Im Zusammenhang mit den Repulsionsmotoren ist auch der Begriff Dérimotor landläufig bekannt. Ich arbeite hier mit dem Repul-sionsmotor, weil so der Motor besser benannt wird.
Auch hier haben wir einen Rotor als drehendes Teil und einen Stator.
Selbst die
Verbindung
der beiden über die Bürsten gab es, aber diese konnten verschoben werden.
Das erlaubte eine Regelung der Drehzahlen, die sich im tiefen Bereich
befanden.
Es
gab bei diesem Motor vier Betriebsstellungen. Das war die
Leerlaufstellung, die Kurzschlussstellung, die Betriebsstellung und die
Bremsstellung. In jeder konnten sowohl Stator, als auch Rotor verändert
werden. Sollten Sie sich nun Fragen, wie denn das geregelt werden sollte,
der kann sich in etwa vorstellen, wie sich damals das Personal auf diesen
Lokomotiven gefühlt
hatte, zumal es auch
Triebfahrzeuge
mit dem Seriemotor gab.
Hauptprobleme der Repulsionsmotoren war der hohe Anteil bei der
Blindleistung so neigten hier die Kollektoren zu einer grossen
Anfälligkeit auf Bürstenfeuer. Das führte bei der
BLS-Gruppe
dazu, dass diese
Lokomotive nicht
übernommen wurde, denn dort wollte man keine Blindleistung und das war mit
dem Dérimotor schlicht ein Ding der Unmöglichkeit. In anderen Ländern
zeigen sich ähnliche Probleme mit dem Motor.
An die Schweizerischen Bundesbahnen SBB wurde im Jahre 1919 die erste so aufgebaute Lokomotive ausgeliefert.
Im
Jahre 1985 sollte diese Tradition mit einer
Lokomotive der Reihe
Re
4/4 II
en-den. Es waren also über 66 Jahre keine grossen Anpassungen nötig. Spannend ist hingegen, dass man diesen Seriemotor ohne Änderungen auch bei Gleichstrom verwenden kann.
Der
Strom
durchfliesst die beiden Spulen und der Motor dreht sich. Es bleibt dabei
einfach der permanente Wechsel beim Magnetfeld aus. Wir haben einen
Universalmotor geschaffen, der jedoch einen Kollektor hatte. Schliesslich
verschwand dieser Motor, als es gelang, Drehstrommotoren mit Hilfe der
Umrichtertechnik zu verwenden.
Mit
Hilfe des Umrichters konnte der Drehstrommotor und dort der Asynchronmotor
endlich seine überlegenen Vorteile ausspielen, es verwundert deshalb
nicht, dass in der Folge die anderen Motoren aus den
Lokomotiven
verschwanden. Sie können sich daher einen einfachen Grundsatz merken. 90
Jahre lang gab es den Universalmotor und erst danach kam der
Drehstrommotor. Das stimmt nicht ganz genau, aber es soll ja auch nur eine
Hilfe sein.
Bleibt eigentlich nur noch zu sagen, dass auch andere Motoren für
Wechselstrom
entwickelt wurden. Diese waren in ihrem Verhalten einfacher, mussten
jedoch etwas komplizierter aufgebaut werden. Diese durchaus guten Motoren
kamen jedoch bei der Eisenbahn nicht zum Einsatz, denn der Seriemotor war
so einfach und so robust, dass man keinen anderen Motor mehr verbaute, vor
allem dann, als man damit noch elektrisch bremsen konnte.
|
|||||
| Zurück | Navigation durch das Thema | Weiter | |||
| Home | Depots im Wandel der Zeit | Die Gotthardbahn | |||
| News | Fachbegriffe | Die Lötschbergbahn | |||
| Übersicht der Signale | Links | Geschichte der Alpenbahnen | |||
| Die Lokomotivführer | Lokführergeschichte | Kontakt | |||
|
Copyright 2026 by Bruno Lämmli Lupfig: Alle Rechte vorbehalten |
|||||
 Präziser
müssen wir den allgemeinen Motor zu einem Triebmotor machen. Damit sind
wir beim Bauteil, das aus unserer
Präziser
müssen wir den allgemeinen Motor zu einem Triebmotor machen. Damit sind
wir beim Bauteil, das aus unserer
 Gleichstrommotoren
sind die ältesten Motoren die es gibt. Der erste elektrisch betriebene Zug
der Welt fuhr mit
Gleichstrommotoren
sind die ältesten Motoren die es gibt. Der erste elektrisch betriebene Zug
der Welt fuhr mit

 Wir
haben einen funktionierenden Motor für
Wir
haben einen funktionierenden Motor für
 Wir
haben einen funktionierenden Motor, der für die Eisenbahn geeignet ist,
erhalten. Das heisst, der Gleichstrommotor war einfach zum entwickeln und
er funktionierte eigentlich recht gut.
Wir
haben einen funktionierenden Motor, der für die Eisenbahn geeignet ist,
erhalten. Das heisst, der Gleichstrommotor war einfach zum entwickeln und
er funktionierte eigentlich recht gut. Drehstrommotoren
sind wohl die besten und stabilsten elektrischen Motoren die es gibt. Man
behauptet sogar, dass gewisse Drehstrommotoren auch ohne Wartung nicht zu
zerstören seien.
Drehstrommotoren
sind wohl die besten und stabilsten elektrischen Motoren die es gibt. Man
behauptet sogar, dass gewisse Drehstrommotoren auch ohne Wartung nicht zu
zerstören seien.
 Der
Asynchronmotor ist sehr nahe mit dem Gleichstrommotor ver-wandt. Auch hier
kommt ein permanentes Magnetfeld zur An-wendung. Der Unterschied liegt
aber bei der Position.
Der
Asynchronmotor ist sehr nahe mit dem Gleichstrommotor ver-wandt. Auch hier
kommt ein permanentes Magnetfeld zur An-wendung. Der Unterschied liegt
aber bei der Position. Auch
der Asynchronmotor kann sich ohne Umbau zu einem Generator wandeln. Wird
die Welle bewegt, wird durch das permanente Magnetfeld in den Spulen ein
Auch
der Asynchronmotor kann sich ohne Umbau zu einem Generator wandeln. Wird
die Welle bewegt, wird durch das permanente Magnetfeld in den Spulen ein
 Jedoch
haben die Synchronmaschinen noch einen Kollektor, der regelmässig gewartet
werden muss. Da bei den anderen Drehstrommotoren kein Kollektor vorhanden
ist, werden sie zum idealen Motor für
Jedoch
haben die Synchronmaschinen noch einen Kollektor, der regelmässig gewartet
werden muss. Da bei den anderen Drehstrommotoren kein Kollektor vorhanden
ist, werden sie zum idealen Motor für
 Wer
um 1900 etwas von Elektrotechnik verstand, oder zumindest glaubte davon
etwas zu verstehen, wagte sich an einen Wechselstrommotor. Das System
hatte sich durchgesetzt, aber noch fehlte ein Motor.
Wer
um 1900 etwas von Elektrotechnik verstand, oder zumindest glaubte davon
etwas zu verstehen, wagte sich an einen Wechselstrommotor. Das System
hatte sich durchgesetzt, aber noch fehlte ein Motor.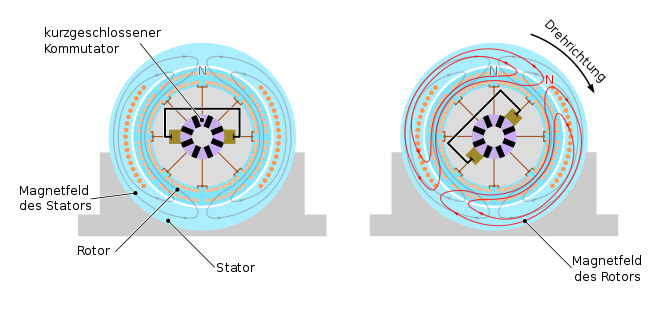
 Das
war der Grund, dass sich der Serie-motor bei den Bahnen durchsetzen
konn-te. Die ersten so ausgerüsteten Modelle gab es bei der
Das
war der Grund, dass sich der Serie-motor bei den Bahnen durchsetzen
konn-te. Die ersten so ausgerüsteten Modelle gab es bei der