|
Spannungsregulierung klassisch |
|||||
|
Wir haben nun die Hochspannung der Fahrleitung bei den Lokomotiven mit Wechselstrom, mit Hilfe eines Transformators, in verträglichere Werte umgewandelt. Damit können wir aber noch nicht viel anfangen, denn wie regeln wir die Drehzahl der Fahrmotoren genau? Wir benötigen etwas, dass uns eine veränderliche Spannung für den Fahrmotor gibt. Die haben wir bisher noch nicht. Bei den Modellbahntransformatoren haben Sie bereits eine mögliche Lösung gesehen. Nun kommen aber auch die Lokomotiven hinzu, die mit Gleichstrom oder mit Drehstrom betrieben werden. Wir sehen uns nun die möglichen Varianten an und können so die Eignung für eines der drei Spannungssysteme erkennen. Jedoch müssen wir dazu wissen, wie die Drehzahl der Fahrmotoren genau geregelt wird. Nur schon hier zeigen sich deutliche Unterschiede zwischen den Stromsystemen ab, die nicht unerwähnt bleiben dürfen. Bei Bahnen, die mit Wechselstrom betrieben werden, reduziert man die Spannung der Fahrleitung mit einem Transformator. Dieser Transformator besitzt mehrere Anzapfungen, die dann mit den hier vorgestellten Möglichkeiten zu einer veränderlichen Spannung geschaltet werden. So wird die Drehzahl des Motors verändert und die Lokomotive kann unterschiedliche Geschwindigkeiten erreichen. Man zapft daher immer eine Anzapfung des Transformators an. Gleichstrom kann nicht mit Hilfe eines Transformators verändert werden. Daher musste man hier zu anderen Lösungen greifen. Egal welche Lösung man verwendete, die Spannung musste auch hier am Fahrmotor verändert werden. Daher arbeitete man hier mit eigenen Lösungen, die zum Teil die Schaltelemente bei Wechselstrom verwenden konnten. So gesehen ist eine Regelung bei Gleichstrom ähnlich möglich, wie bei Wechselstrom. Besonders schwer stellt sich jedoch die Regelung bei Drehstrom dar. Die Vorteile dieses Motors konnten nicht umgesetzt werden. Die Schaltelemente, die hier verwendet wurden, kamen zum Teil auch zur Anwendung. Hier ändert man die Drehzahl des Fahrmotors jedoch mit den möglichen Schaltungen der Fahrmotoren. Es wird daher eine eigene Lösung geben müssen. Trotz der Tatsache, dass Drehstrom mit Wechselstrom nahe verwandt ist, kann man diese beiden Systeme nicht vergleichen. Genau hier bei der Regelung der Drehzahl des Fahrmotors, liegt der Vorteil des Wechselstromes begründet. Bei Gleichstrom musste man mit Widerständen arbeiten und bei Drehstrom konnte man die Drehzahlen nur in einem beschränkten Rahmen regulieren. Nur der Wechselstrom bot wegen dem Transformator die Möglichkeit, die Spannung an den Fahrmotoren ohne Verluste sehr fein zu regulieren. Daher setzte sich der Wechselstrom schon sehr früh durch und die anderen Systeme wurden verdrängt. Ich beginne nun mit der klassischen Regelung der Spannung am Fahrmotor. Dabei reguliere ich die Spannung zuerst bei den Lokomotiven, die mit Wechselstrom versorgt werden. Danach kommen dann die Lösungen, die bei Gleichstrom angewendet werden. Zum Schluss wenden wir uns den Lokomotiven zu, die mit den Motoren für Drehstrom betrieben werden. Die Reihenfolge hat für mich praktische Vorteile und wurde deswegen so gewählt.
|
|||||
|
Regelung bei Wechselstrom |
|||||
|
Wenn wir mit der Regelung der Spannung für einen Motor mit Wechselstrom beginnen, hat das zwei Gründe. Es kommen nun die Lösungen, die am meisten verwendet wurden. Die hier nun vorgestellten Schaltelemente kommen auch bei den anderen Stromsystemen zur Anwendung. Sie lernen so die Funktion kennen und wir können uns später den speziellen Lösungen der anderen Systeme zuwenden. Damit ich mich nun aber beim Wechselstrom nicht wiederholen muss, erwähne ich die grundlegende Schaltung.
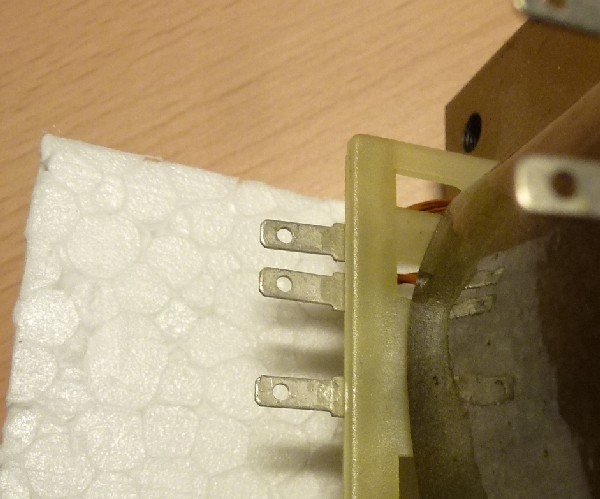
Diese Anzapfungen stellen nun unterschiedliche Spannungen zur Verfügung, die dem Fahrmotor zugeführt werden können. Diese einzelnen Spannungen stehen daher sehr leicht bereit und grundsätzlich zeigen die Lösungen nur auf, wie man diese Anzapfungen schaltet. Die Regulierung der Spannung muss so konstruiert werden, dass die einzelnen Anzapfungen nicht kurz geschlossen werden und dass der Fahrmotor immer mit Spannung versorgt wird. Das klingt einfacher, als es ist, denn die beiden Punkte dürfen nicht vernachlässigt werden. Daher spielen die hier vorgestellten Lösungen genau in diesen Bereich. Sie werden schnell erfahren, dass das wirklich grosse Probleme waren, die gelöst werden mussten. Der Modellbahntransformator hat eine Lösung aufgezeigt. Sie steuern so die Lokomotiven auf Ihrer Modellbahn. Grundsätzlich stehen dieser Lösung bei der Eisenbahn eigentlich keine Hindernisse im Weg. Man kann diese Lösung auch für grosse Züge anwenden. Die Probleme finden sich aber bei den hohen Leistungen, die übertragen werden müssen. Trotzdem sollten Sie sich einmal die Geschichte der Re 8/12 etwas genauer ansehen. Hüpfersteuerung: Bei der nun vorgestellten Hüpfersteuerung handelt es sich um eine sehr schnelle Regelung der Spannung. Bei der Schaltgeschwindigkeit dieser Steuerung kann keine andere Lösung mithalten. Sie kam auch sehr früh zur Anwendung, so dass wir mit der Hüpfersteuerung beginnen. Daher beginnen wir gleich bei den hier verwendeten Schaltelementen, die hier vielen Lesern ein kleines Problem bereiten kann. Die Lösung dieses Problems sollte sogar einfacher sein, als Sie denken.
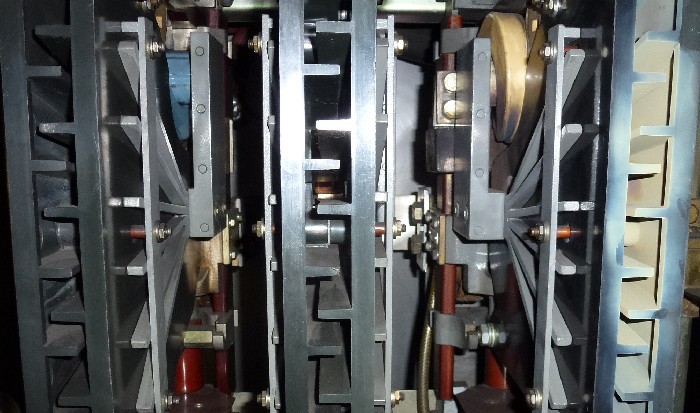
Der Begriff des Hüpfers wurde früher allgemein für solche elektropneumatischen Schalter verwendet. Gehalten hat sich der Hüpfer eigentlich nur noch bei den Eisenbahnen und auch dort wird die Bezeichnung nicht mehr überall verwendet. Deshalb komme ich hier zur üblichen Bezeichnung. In elektrotechnischen Fachkreisen werden die Hüpfer heute als Schütze bezeichnet. Ein Schütz ist ein Bauteil, das mit einer fremden Energie oder mit einem fremden Signal die Hauptkontakte schliesst. Man könnte eigentlich auch von einem Fernschalter sprechen, jedoch würde das den Eigenschaften eines Schützes nicht gerecht werden. Daher lohnt es sich sicher, wenn wir uns diese Schütze oder Hüpfer anhand der Schütze genauer ansehen. Meistens kommen elektromagnetische Schütze zur Anwendung. Hier wird durch eine Spule elektrisch ein Magnetfeld erzeugt, dass dann die Hauptkontakte schliesst. Wir versorgen daher die Spule mit Spannung und der Schütz schliesst seinen Kontakt. Daher können wir den Schütz von einer entfernten Stelle aus fernbedienen. Diese Lösung kann das Bedienelement im Führerstand sein, oder aber eine Schutzfunktion der Lokomotive. Der Hüpfer unterscheidet sich von einem Schütz nur durch die pneumatische Ansteuerung. Deshalb wird in den elektrotechnischen Fachkreisen keine Unterscheidung mehr gemacht. Das heisst, dass für Sie einfach Schütz gleich Hüpfer gilt. Die Bahnen sind da etwas eigen und hüpfen vor Freude, wenn Sie erklären, dass ein Schütz einem Hüpfer entspricht. Vermutlich hat die Person dann irgendwo einen Luftanschluss. Für eine Hüpfer- oder Schützensteuerung benötigt man mehrere solche Schalter. Jeder Hüpfer wird dabei mit einer Anzapfung am Transformator angeschlossen. Das heisst, wenn sich der Hüpfer schloss, war eine Verbindung zu dieser Anzapfung vorhanden und es konnte ein Strom fliessen. Jedoch war damit zwar eine Regelung der Spannung möglich, aber die unterbruchsfreie Versorgung des Motors fehlte. Daher musste man in die Trickkiste greifen. Die Hüpfer schloss man nicht direkt an den Fahrmotor an, sondern schaltete sie einer Überschaltdrosselspule zu. Diese Drosselspulen wurden ähnlich aufgebaut, wie ein Transformator mit mittiger Anzapfung. So konnten dort auch zwei Hüpfer und damit auch zwei Anzapfungen angeschlossen sein und es gab keinen Kurzschluss. Die Überschaltdrosselspule war daher eine Strombegrenzung, die es ermöglichte, die Fahrstufen ohne Unterbruch zu schalten. Die Hüpfer wurden mit der vorgegebenen Schaltfolge den Überschaltdrosselspulen so zugeschaltet, dass immer Spannung an den Fahrmotoren anliegt. Die Schaltfolge ist bei den Maschinen vorgegeben und kann zeitweise mehrere Hüpfer umfassen. Hier eine genaue Auflistung zu zeigen brächte nicht viel, da diese bei jeder Lokomotive eigens abgestimmt wurde. Sie müssen daher nur wissen, dass die Schaltfolge regelte, welche Hüpfer geschlossen wurden und welche nicht. Bei den Schützen oder Hüpfer, die grössere Spannungen schalten müssen, gelten ähnliche Kritikpunkte wie bei einem Hauptschalter. Deshalb verwendet man hier oft Hüpfer, da mit der verwendeten Druckluft der Funke wie beim Drucklufthauptschalter gelöscht werden kann. Man lässt bei einem Hüpfer den Funken daher zu und bläst in vom eigentlichen Kontakt weg. So wird der Funke gelöscht. Diese Löschung ist hörbar, so dass eine Hüpfersteuerung ganz besondere Geräusche von sich gibt. Der Abreissfunke wird beim Hüpfer oder beim Schütz in ein Funkenhorn geleitet. Dieses Funkenhorn ist nach aussen gebogen und erweitert sich so je mehr es sich von eigentlichen Hüpfer entfernt. Der Abreissfunke folgt nun diesem Funkenhorn und wird am Ende durch die grosse Distanz gelöscht. Funkenhörner kommen bei oft geschalteten Trennmessern auch zur Anwendung, die erlauben es daher auch, kleinere Leistungen sicher und korrekt zu löschen. Eine andere Lösung ist der Löschkamin. Über die Funkenhörner wird ein Löschkamin gesteckt. Dieses besteht aus einem festen Kunststoff und hat in seinem Inneren Schikanen montiert. So muss der Funke einen Umweg machen, was die Distanz erhöht und so den Funken schneller löscht. Das heisst, bei einem Löschkamin kann das Funkenhorn verkleinert werden, weil sich der Abreissfunke im Löschkamin verliert. So aufgebaute Schaltungen funktionieren recht zuverlässig. Da die Schaltungen in wenigen Millisekunden erfolgen, kann die Schaltfolge in wenigen Sekunden durchgeschaltet werden. Das macht die Hüpfersteuerung zu einer schnellen Steuerung. Diese hatte aber den Nachteil, dass ein defekter Hüpfer zum Ausfall einer Fahrstufe führen konnte. Daher suchte man nach anderen Lösungen und fand sie beim Stufenschalter. Stufenschalter: Die Regelung der Spannung an den Fahrmotoren mit Hilfe von Stufenschaltern ist auch schon seit Beginn der elektrischen Zugförderung mit Wechselstrom dabei. Bei dieser Art der Regelung wird die Spannung durch diverse Kontakte, die sich aneinander reihten, geschaltet. Sie können sich das vereinfacht als eine Art Auswahlschalter vorstellen. Sie wählen einfach den richtigen Kontakt und schon haben Sie die gewünschte Spannung. Stufenschalter werden in der Regel als gerade verlaufende Schaltbahn aufgebaut. Das heisst, der Kontaktschlitten verschiebt sich darauf immer um eine Kontaktbreite und verbindet diese so mit dem Fahrmotor. Dieser erhält in der Folge immer eine andere Spannung, die derjenigen entspricht, die an der am Kontakt angeschlossenen Anzapfung, abgegeben wurde. Anders gesagt, jede Anzapfung wurde mit einem Kontakt am Stufenschalter verbunden. Unter
den Stufenschaltern war die Bauform mit einer Lösung mit flacher
Kontaktbahn sehr oft verwendet worden. Diese speziellen Lösungen werden
als Flachbahnstufenschalter bezeichnet. Dabei gibt der Begriff nur die Art
des Aufbaus bekannt. Bei der grundsätzlichen Funktion gab es zu den
anderen hier erwähnten Stufenschaltern jedoch keinen Unterschied. Bekannt
geworden ist der Flachbahnstufenschalter durch die Modelle des Herstellers
BBC. Die sehr gut funktionierenden
Flachbahnstufenschalter verschwanden jedoch aus einem Grund, der auf den
ersten Blick befremdlich wirkt. Durch die flache Kontaktbahn benötigten
diese Stufenschalter sehr viel Platz. Dieser war jedoch mit zunehmender
Leistung immer mehr
beschränkt. Daher wurden die Lösungen mit der Kontaktbahn im
Kreis
verbaut. Sie sehen, manchmal mussten neue Lösungen auch nur wegen dem
Platzbedarf gesucht werden.
Die einzelnen Schritte bei einem
Stufenschalter werden Fahrstufen genannt. Die Anzahl der möglichen
Fahrstufen hängt letztlich von Stufenschalter ab und auf dessen
Schaltzeit. Nehmen die
Lokomotive der Baureihe
Ae 8/14,
so hatte diese Maschine 58 Fahrstufen. Die wurden in Schritten von einer
Sekunde geschaltet. So dauerte ein Durchlauf nahezu eine Minute. Daher
kommt dem Antrieb des Stufenschalters eine wichtige Bedeutung zu. Angetrieben werden Stufenschalter durch einen Antrieb, der mit Druckluft oder elektrisch betrieben wird. Auch eine mechanische Betätigung ist möglich. Wichtig dabei ist eigentlich nur, dass mit den gesendeten Signalen der Gleitschuh verschoben wurde. Die Schaltung der einzelnen Anzapfungen zum Fahrmotor war daher ohne Problem möglich. Diese Stufenschalter arbeiten daher eher träge und konnten hier nicht mit den Hüpfern mithalten. Das heisst, es dauert eine gewisse Zeit, bis die einzelnen Stufen geschaltet sind. Durch diese Trägheit kann eine Lokomotive jedoch feinfühliger gefahren werden. Der Nachteil ist, dass es ewig dauert, bis der Stufenschalter abgelaufen ist. In der Regel geht man bei Stufenschaltern von 1 – 2 Stufen pro Sekunde aus. Doch reichte das nicht bei allen Lokomotiven, so dass man die Stufenschalter verbesserte und so Stufenwähler erschuf. Eine spezielle Bauform des Stufenschalters war der Stufenwähler. Er wurde nicht mehr gerade aufgebaut, sondern bestand aus einem runden Kontaktgehäuse. Die Funktionsweise, die wir nachher noch genauer anschauen werden, ist jedoch mit dem Stufenschalter identisch. Der Stufenwähler ist durch seine kompaktere Bauweise in der Lage bis zu 3 Stufen pro Sekunde zu schalten. Jedoch haperte es auch hier bei der unterbruchsfreien Versorgung der Spannung.
Diese Schritte sind zeitaufwändig, so dass der Stufenschalter gegenüber einer Steuerung mit Hüpfer träge wirkt. Doch schauen wir uns die einzelnen Zwischenschritte bei einem Stufenschalter an. Wir nehmen nicht den Stufenwähler, weil der zu schnell ist und wir so schnell lesen müssten. Gehen wir davon aus, dass wir eine Stufe zuschalten wollen. Der in der bisherigen Stufe ruhende Kontaktfinger wird durch unseren Befehl in Bewegung gesetzt. Dabei wird zuerst ein Hilfskontakt auf die neue Stufe geschaltet und dadurch diese mit der bisherigen Stufe verbunden. Wir haben somit zwei Anzapfungen an den Fahrmotoren angeschlossen. Das ergäbe so einen Kurzschluss, was aber nicht passieren darf, deshalb ist der Hilfskontakt speziell geschaltet worden. Dieser Hilfskontakt besitzt einen Überschaltwiderstand. Dank diesem Widerstand entstehen kleinere Spannungsunterschiede zwischen dem bisherigen Kontakt und dem Hilfskontakt. Auch der Strom wird durch den Widerstand auf einen erträglichen Wert beschränkt. Damit haben wir nun die neue Stufe mit der bisherigen Stufe verbunden. Den Kurzschluss, der dabei entstehen würde, beschränkt der Überschaltwiderstand. Beim nächsten Schaltschritt ist der Fahrmotor nur über den Überschaltwiderstand an der neuen Fahrstufe angeschlossen. Deshalb wird der Hauptkontakt nun auch auf die neue Stufe geschlossen. Jetzt ist der Hauptkontakt mit dem Hilfskontakt über den Widerstand verbunden. Der Strom fliesst nun über den Hauptkontakt und der Hilfskontakt mit dem Widerstand kann wieder geöffnet werden. Wir haben die neue Stufe ohne Unterbruch der Versorgung geschaltet. Dieser Überschaltwiderstand darf nur sehr kurz geschaltet sein, da er nicht für längere Belastungen ausgelegt ist. Schliesslich fliesst der gesamte Strom zu den Fahrmotoren einen kurzen Moment über diesen Widerstand. Bleibt der Stufenschalter auf dem Hilfskontakt stehen, würde der Widerstand beschädigt. Daher ist dieser Widerstand überwacht. Bleibt er zu lange eingeschaltet, schaltet die Lokomotive aus und es fliesst kein Strom mehr zu den Fahrmotoren. Stufenschalter haben einen gewaltigen Nachteil. Sie benötigen eine gewisse Zeit, bis sie abgeschaltet sind. Gehen wir von einem voll aufgeschalteten Stufenschalter mit 30 Fahrstufen aus. Es dauert nun bei einer Schaltgeschwindigkeit von 2 Stufen pro Sekunde ganze 15 Sekunden bis der Stufenschalter auf die Neutralstellung zurück gelaufen ist. In einer Notsituation, wo es um Bruchteile von Sekunden geht, sicherlich ein Problem. Hier hatte die Regelung mit Hüpfer einen Vorteil. So griff man auch beim Stufenschalter zu einem Hüpfer. Man verwendet deshalb einen Trennhüpfer. Dieser ist gleich aufgebaut wie die Stufenhüpfer der Hüpfersteuerung. Er hat aber eine andere Aufgabe. Beginnen wir mit der Fahrt, wird zuerst der Trennhüpfer eingeschaltet und so die Verbindung zwischen Stufenschalter und Fahrmotor hergestellt. Erst jetzt kann vom Stufenschalter Strom zu den Fahrmotoren fliessen. Eine weitere Funktion bei der Wahl der Fahrstufen hat der Trennhüpfer jedoch nicht mehr. Muss nun im Notfall eine Schnellabschaltung erwirkt werden, kann das Personal den Bedienhebel in die Neutralstellung bringen. Dadurch wird der Trennhüpfer deaktiviert und schaltet in der Folge den Fahrmotorstrom und somit die Zugkraft ab. So spielt es dann keine Rolle mehr, dass der Stufenschalter 15 Sekunden benötigt, bis er in seiner Grundposition angelangt ist. Beim Trennhüpfer handelt es sich somit um einen Hauptschalter für die Fahrmotoren. Bei der
klassische Regelung der
Spannung
für die
Fahrmotoren,
kann deren Drehrichtung nicht direkt geändert werden. Aus diesem Grund
werden Wendeschalter verwendet. Dabei handelt es sich um Umschalter, die
je nach der Stellung bestimmte Kontakte miteinander verbinden. Durch die
Beschaltung dieser Kontakte eines Wendeschalters kann die Drehrichtung,
aber auch andere Effekte eingestellt werden. Eine
spezielle Form der Wendeschalter sind die Fahren- /Bremsumschalter. Es
handelt sich dabei um ganz normale Wendeschalter, die jedoch so beschaltet
wurden, dass sie nicht die Drehrichtung derselben, sondern deren
Betriebsart ändern. Die Unterscheidung zu den üblichen Wendeschaltern
erfolgte nur durch die Aufteilung auf zwei Schaltelemente und damit zu
deren Identifizierung.
|
|||||
|
Regelung mit Umformung |
|||||
|
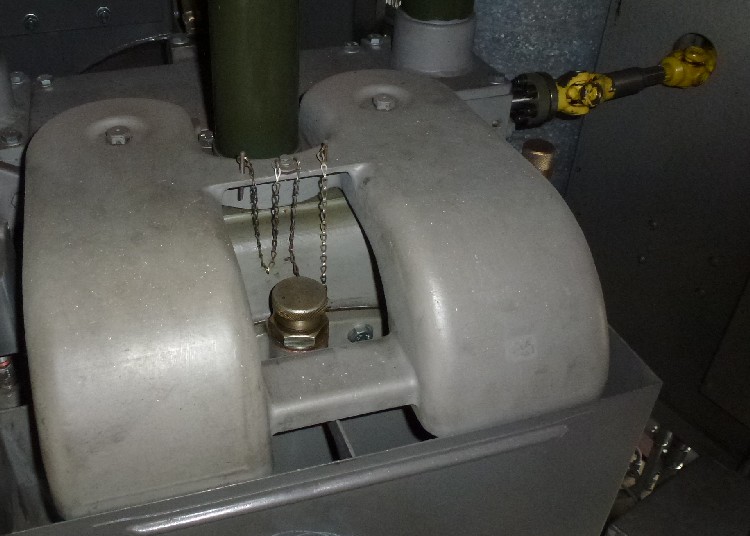
Bisher lernten wir die Schaltungen kennen, die den Wechselstrom direkt zu den Motoren leitet. Nun treten wir in die Welt der Lokomotiven ein, die die Spannung der Fahrmotoren damit ändern, dass sie die Wechselspannung der Fahrleitung in eine Gleichspannung umwandeln. Dabei dürfen wir aber diese Lösungen nicht mit den Varianten, wie sie bei der modernen Regelung verwendet werden, verwechseln. Diese werden später noch eingehend behandelt werden. Es ist etwas überraschend, denn die Umformung der Spannung gehört klar in den Bereich der modernen Traktionssteuerung mit Halbleitern und man erwartet sie nicht hier bei der klassischen Lösung. Bei der klassischen Regelung vermutet man kaum keine Umformung der Spannung. Ich werfe aber nun in die Runde, dass die erste elektrische Lokomotive die mit Wechselstrom aus der Fahrleitung versorgt wurde, hierher gehört und daher die Spannung umformte. Der Umformer: Man kann die Spannung aus der Fahrleitung mit Hilfe eines Umformers an die Spannung der Fahrmotoren anpassen. Der Umformer ist deshalb eigentlich nicht anderes als ein Bauteil das aus einer Spannung eine andere macht. Dabei funktioniert jeder Umformer auf die gleiche Art und Weise und hat mit den modernen Lösungen nicht viel gemeinsam. Daher sollten wir einen genaueren Blick darauf werfen.
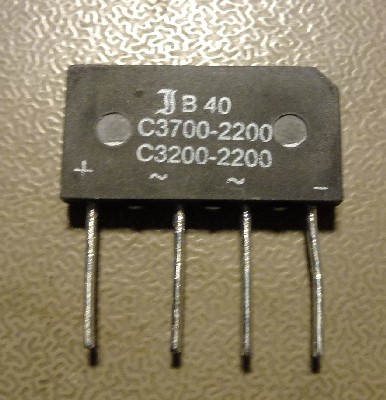
Diese Einrichtung aus Motor und Generator, nennt man korrekterweise Umformergruppe. Diese besteht, wie schon gesagt, aus einem Motor für die Spannung aus der Fahrleitung und einem Generator, der durch diesen Motor angetrieben wird und der eine andere Spannung erzeugt. Grundsätzlich war das Wechselstrom, der so zu Gleichstrom umgewandelt wurde. Andere Lösungen, wie etwa der Wechsel auf Drehstrom gab es nicht. Diesen Weg wählte man bei der ersten Lokomotive für Wechselstrom. Dabei bot der Umformer viele Vorteile. Der Motor konnte so optimal mit einer festen Spannung eingesetzt werden. Denn um 1900 herum wusste man noch nicht genau, wie man die Drehzahl eines Motors für Wechselstrom regelte. Durch den Umformer konnte man einen Motor mit fester Drehzahl wählen und diesen so optimal nutzen. Was für einen sehr schweren Motor sicherlich sinnvoll war. Der Generator, also der Teil der Umformergruppe, der die neue Spannung erzeugt, konnte so eine Spannung liefern, die man für den Fahrmotor regulieren konnte. Generatoren gibt es heute hauptsächlich in Kraftwerken. Sie funktionieren grundsätzlich umgekehrt zu den Motoren. Das heisst, beim Generator wird eine Welle angetrieben und so eine Spannung erzeugt. Welche Spannung dabei entsteht, hängt vom Aufbau des Generators ab. Durch das drehen der Welle entsteht dank dem Elektromagnetismus eine Spannung in den Spulen des Generators. Die Informationen dazu haben Sie schon bei den Kraftwerken bekommen. Der Generator hier unterschied sich im Aufbau nur durch seine Grösse und damit durch die mögliche Leistung. Der Generator könnte theoretisch auch als Motor eingesetzt werden. Lokomotiven nutzen diesen umgekehrten Effekt für den Aufbau einer elektrischen Bremse. Sie verstehen vielleicht, wenn ich sage, dass dieser ersten Lokomotive keine grosse Zukunft beschieden war. Es blieb schlicht bei dieser einzigartigen Lokomotive, die so aufgebaut wurde. Letztlich wurde auch diese umgebaut und die Umformer verschwanden gänzlich aus der Antriebstechnik einer Lokomotive. Kleinere Umformer wurden aber noch viele Jahre lang zur Ladung der auf dem Fahrzeug montierten Batterien genutzt. Letztlich gewann aber auch dort die Halbleitertechnik. Die Gleichrichterlokomotive: Man kann die Spannung auf einer Lokomotive aber auch auf anderer Weise umwandeln. Dabei macht man zwar den gleichen Schritt, wie es bei der Lokomotive mit Umformer schon gewählt wurde, man wählt jedoch eine andere Lösung. Das heisst, man macht aus dem Wechselstrom einen Gleichstrom. Deshalb gehören diese Lokomotiven auch in die Gruppe der Umformerlokomotiven. Statt einer Umformergruppe wählte man hier aber einen Gleichrichter. Gleichrichter sind speziell aufgebaute Schaltungen mit Dioden oder Elektronenröhren. Dabei benennt der Gleichrichter eigentlich nur die Beschaltung dieser Dioden, die häufig auch als Gleichrichter bezeichnet werden. Diese Bezeichnung stimmt aber nicht ganz. Diesen Fehler sollten sie in Zukunft jedoch nicht mehr begehen, daher sehen wir uns das genauer an.
Die Elektronenröhre ist einer der ersten Halbleiter die es gab. In der Elektronenröhre treten die Elektronen aus der Kathode und werden durch die Anode wieder aufgefangen. Damit das klappt, ist die Röhre mit entsprechendem Material, dem Quecksilberdampf, gefüllt worden. Sie hatten ihren Erfolg in der Radiotechnik, wo dank diesen Röhren erste Empfangsgeräte gebaut werden konnten. Das Röhrenradio ist Ihnen vielleicht noch ein Begriff. Bei der Eisenbahn kamen diese Elektronenröhren auch zur Anwendung. Man nannte sie dort aber Quecksiberdampfgleichrichter. Dabei handelte es sich aber um eine Elektronenröhre, die mit Quecksilber und Edelgas gefüllt war. Sie verschwanden aber wie die Elektronenröhren mit der Einführung von Siliziumdioden. Diese waren im Aufbau viel einfacher und besser zu handhaben. Daher lohnt es sich, wenn wir auch diese Siliziumdiode genauer ansehen. Die Siliziumdiode ist heute nicht mehr aus der modernen Elektronik wegzudenken. Dazu nutzt man Silizium, das in Sand enthalten ist, und nutzt dessen Eigenschaften. Dadurch erhält man ein Bauteil, das den Strom nur in einer Richtung leitet und diesen in der Gegenrichtung sperrt. Es handelt sich deshalb auch hier um einen Halbleiter. Wie verbreitet Siliziumdioden sind, zeigt nur schon die Tatsache, dass man sie schlicht als Diode bezeichnet. Dioden sind der Begriff für Halbleiter, die den elektrischen Strom nur in einer Richtung fliessen lassen. Der Aufbau mit Silizium machte sie gegenüber den Quecksilberdampfgleichrichtern einfacher im Aufbau. Für einen Gleichrichter benötigt man mindestens vier Dioden, die speziell geschaltet werden müssen. Es spielt jedoch keine Rolle, ob Sie von einer Diode oder einer Siliziumdiode sprechen, es ist das gleiche Bauteil. Die genaue Ansteuerung der Fahrmotoren erfolgt dann wieder, wie bei einer Lokomotive für Fahrleitungen, die mit Gleichspannung versorgt wurden. Diese Lösung dient uns nun aber als elegante Überleitung auf die Ansteuerung der Fahrmotoren und Gleichstrom. Wir können daher die Regelung der Spannung an den Fahrmotoren bei Bahnen mit Wechselstrom abschliessen und nun zu den Bahnen wechseln, die sich für Fahrleitungen mit Gleichstrom entschieden haben.
|
|||||
|
Regelung bei Gleichstrom |
|||||
|
Im Gegensatz zum Wechselstrom und dessen Möglichkeit die Spannung am Fahrmotor einfach zu regulieren, kann man bei Gleichstrom nicht auf einen Transformator zurückgreifen. Die Gleichspannung aus der Fahrleitung muss den Fahrmotoren zugeführt werden. Das führt aber dazu, dass man die Drehzahl am Fahrmotor eigentlich nicht regeln kann. Damit das trotzdem geht, musste man andere Lösungen für die Regelung der Spannung finden und verwirklichen. Diese anscheinende Möglichkeit Gleichspannung nicht zu regulieren, macht den Einsatz von Gleichstrom bei Bahnen schier unmöglich. Trotzdem kam es zu Eisenbahnen, die so ausgerüstet wurden. Der Grund dabei ist simpel, denn man hatte bei Gleichstrom einen angemessen funktionierenden Motor gefunden. So wurde Gleichstrom mit diversen Lösungen geregelt. Die Tatsache, dass auch nach Einführung des Wechselstromes Bahnen mit Gleichstrom elektrifiziert wurden, zeigt deutlich, dass die Lösungen gut funktionierten. Um es vorweg zu nehmen, die Schaltelemente, wie Hüpfer oder Stufenschalter kommen auch hier zur Anwendung und sie haben sogar die gleichen Funktionen. Jedoch muss deren Beschaltung gegenüber dem Wechselstrom geändert werden. Ist das erfolgt, kann man auch Gleichstrom regulieren und so die Geschwindigkeit der Lokomotive steuern. Genau diese geänderte Ansteuerung werden wir bei der ersten Version der Regelung ansehen. Die Widerstände: Eine früh entdeckte Lösung ist die Verwendung von Widerständen. Diese Widerstände nehmen eine gewisse Leistung auf und reduzieren so die Spannung, die am Fahrmotor angewendet wird. Die Funktion des Widerstandes ist schon bei der Vorstellung erklärt worden. Jedoch kann gesagt werden, dass der Strom zum Fahrmotor im Widerstand einen Abfall der Spannung ergibt. Der in Reihe angeschlossene Fahrmotor bekommt so weniger Spannung.
Wie es der Name schon sagt, sind Anfahrwiderstände eigentlich nicht für einen längeren Betrieb gedacht und werden nur beim Anfahren benötigt. Der Grund liegt in der Tatsache, dass in den Widerständen die abgebaute Leistung aus Verlustleistung anfällt und so zur Erwärmung des Widerstandes führt. Damit der Anfahrwiderstand nicht zu heiss wird, muss er gekühlt werden. Oft bleiben zur Vereinfachung der Bedienung die Anfahrwiderstände auch bei der Fahrt zugeschaltet. Oft reichen die Anfahrwiderstände und wir erhalten so eine Lokomotive, die ein paar Stufen aufweisst. Das reicht gerade noch für eine kleine Rangierlokomotiven. Da kann mit sechs Stufen oder weniger gearbeitet werden. Die Lokomotiven für den Streckeneinsatz sind aber auf feinere Abstufungen der Fahrstufen angewiesen, deshalb muss eine weitere Lösung gefunden werden und mit möglichst wenig Anfahrwiderständen eine grössere Anzahl Fahrstufen zu ermöglichen. Man greift deshalb zur Gruppierung der Fahrmotoren und der Anfahrwiderstände. Die Fahrmotoren können so an unterschiedlichen Spannungen betrieben werden, ohne dass dazu zu viele Widerstände notwendig werden. Die Gruppierung setzt daher bei zwei Stellen an. Das ergibt dann schnell mehrere Stufen ohne dass man viele Widerstände benötigt. Gerade die Schaltung der Widerstände von Serie auf parallel verändert den Wert der Widerstände und so die Fahrstufen. Die zweite Möglichkeit besteht darin, dass man die Fahrmotoren ebenfalls Gruppiert. Das geht jedoch nur, wenn man mehrere Fahrmotoren verwendet und deren Anzahl gerade ist. Wir sehen uns das an einem Beispiel an. Anschliessend werden wir dann genauer auf die Schaltung und damit auf die Gruppierung der Anfahrwiderstände eingehen. Damit die Tabelle etwas übersichtlicher wird, lasse ich die Gruppierung der Anfahrwiderstände in der Tabelle weg.
|
|||||
| Fahrstufe | Widerstand | Fahrmotor 1 | Fahrmotor 2 | Fahrmotor 3 | Fahrmotor 4 |
| 1 - 6 | Ja | Alle Motoren in Reihe geschaltet | |||
| 7 | Nein | Alle Motoren in Reihe geschaltet | |||
| 8 – 13 | Ja | In Reihe geschaltet | In Reihe geschaltet | ||
| 14 | Nein | In Reihe geschaltet | In Reihe geschaltet | ||
| 15 – 20 | Ja | Parallel | Parallel | Parallel | Parallel |
| 21 | Nein | Parallel | Parallel | Parallel | Parallel |
|
Beginnen wir bei der Gruppierung der Anfahrwiderstände. Die ersten Fahrstufen werden mit den Anfahrwiderständen geschaltet. Wir können nun davon ausgehen, dass hier sechs Widerstände benötigt würden. Jedoch kann man nun die Widerstände so gruppieren, dass sich deren Anzahl deutlich reduziert. Dabei werden die Anfahrwiderstände mit unterschiedlichen Werten alleine oder in Reihe geschaltet. Für die sechs Fahrstufen werden deshalb nur noch drei Anfahrwiderstände benötigt. Mit den Gruppierungen der Fahrmotoren bei den Stufen 7, 14 und 21, werden die Anzahl Stufen erneut vergrössert. So ergeben sich für dieses Fahrzeug insgesamt 21 Fahrstufen. Damit erreichen wir hier mit der Gruppierung der Fahrmotoren und der drei Anfahrwiderstände eine Stufenzahl, die sich durchaus mit den Fahrstufen bei Wechselspannung vergleichen lässt. Jedoch arbeiten nur die Stufen 7, 14 und 21 ohne Verlustleistung, da dort kein Anfahrwiderstand zugeschaltet wurde. Choppersteuerung: Gerade die hohe Verlustleistung, die man bei den Lösungen mit Anfahrwiderständen hatte, wollte man verringern. Damit wären wirtschaftlicher Lokomotiven geschaffen worden. Daher entwickelte man die Choppersteuerung, die die Fahrstufen verlustarm schalten kann. So gesehen eine gute Lösung, die aber schon sehr nahe bei den modernen Lösungen angeordnet war. Doch sehen wir uns die Choppersteuerung einmal an. Bei der Choppersteuerung wird die Drehzahl an den Fahrmotoren damit geregelt, dass man die Versorgung der Fahrmotoren mit veränderter Einschaltdauer geregelt wird. Sie müssen sich das vereinfacht so vorstellen, dass man dem Fahrmotor für Bruchteile einer Sekunde Strom gibt, dann stellt man ab um wieder Spannung zu schalten. Je länger nun die Spannung eingeschaltet ist, je schneller kann der Fahrmotor drehen und sich das Fahrzeug bewegen. Man spricht hier von einer Impulsregelung. Die Spannung wird in Impulsen dem Fahrmotor zugeführt. Durch die Veränderung der Impulse erreicht man eine nahezu ruckfreie Zuschaltung der Zugkraft. Das Fahrzeug besitzt daher keine Fahrstufen mehr. Da im Stromkreis der Fahrmotoren keine Widerstände geschaltet werden, arbeitet man mit geringen Verlusten. Jedoch benötigt man eine spezielle Ansteuerung der Schaltelemente. Der Gleichstromsteller wird oft als DC-DC-Wandler bezeichnet. Die Spannung aus der Fahrleitung wird dabei im Gleichstromsteller mit Hilfe eines Schalters so geschaltet, dass die Spannung reguliert werden kann. Oft verwendete man dazu Thyristoren, so dass wir uns schon sehr nahe bei der modernen Methode der Steuerung mit Stromrichter befinden. Da hier aber den Fahrmotoren keine veränderte Spannung zugeführt wird, reihe ich die Choppersteuerung mit den Gleichstromstellern bei der klassischen Lösung ein. Die Choppersteuerung war daher eine gute Alternative zu den Anfahrwiderständen und es konnten nun auch ungerade Anzahl von Fahrmotoren verwendet werden. Die Schaltfrequenzen der Gleichstromsteller rufen in den Wicklungen der Fahrmotoren jedoch Schwingungen hervor. Daher kann man Fahrzeuge, die mit einer Choppersteuerung versehen wurden, leicht am Klang der Fahrmotoren erkennen. Mit zunehmender Geschwindigkeit reduzieren sich diese Schwingungen jedoch.
|
|||||
|
Regelung bei Drehstrom |
|||||
|
Für Bahnen, die mit Drehstrom arbeiteten, boten sich nicht viele Möglichkeiten, die Fahrmotoren zu regulieren. Das machte die Vorteile, die der Fahrmotor bot, gleich wieder zunichte. Da bei Drehstrom Wechselströme in den Leitungen messbar sind, erwartet man hier eine Lösung, wie sie bei den Bahnen mit Wechselstrom erfolgte. Das ist jedoch nicht so, denn diese Lösungen funktionierten nicht, weil man keinen Transformator hatte. Daher griff man bei Bahnen mit Drehstrom zu den Lösungen, die man bei den Bahnen mit Gleichstrom verwendete. Man fuhr mit der Hilfe von Anfahrwiderständen und der Gruppierung der Fahrmotoren. Wobei sich hier jedoch eine andere Lösung bot, denn der Motor für Drehstrom kann in sich schon einfacher gruppiert werden. So erreichte man auch bei Drehstrom einige Fahrstufen. Dabei konnten ein paar Fahrstufen sogar wirtschaftlich betrieben werden. Der Fahrmotor für Drehstrom hat in seinem Aufbau drei Spulen. Diese werden benötigt, um das Drehfeld zu erzeugen. Das ergibt nun aber im Motor die Möglichkeit, die einzelnen Wicklungen speziell zu den drei Leitern zu schalten. Diese Schaltungen rufen im Drehstrommotor unterschiedliche Drehzahlen hervor, so dass wir unterschiedliche Fahrstufen erreichen. So ruft zum Beispiel die Sternschaltung eine reduzierte Drehzahl hervor. Bei der Sternschaltung von Motoren unter Drehstrom, werden die einzelnen Wicklungen des Fahrmotors an einer Seite an den jeweiligen Leiter des Drehstromes angeschlossen. Die andere Seite der Spule wurde jedoch in einem mittig gelegenen Punkt miteinander verbunden. Die drei Spulen waren daher miteinander direkt in diesem Punkt, der Sternpunkt genannt wird, verbunden und konnten nun nicht mit der vollen Spannung betrieben werden. Die Sternschaltung wird oft auch als Anlassschaltung bezeichnet. Der Grund dafür findet sich beim Betrieb der einzelnen Spulen unter der halben Spannung. Damit reduzierte sich der Strom und der Fahrmotor konnte mit geringen Strömen in Schwung versetzt werden. Das wirkte sich positiv auf die Schaltelemente aus, denn die wurden mit einem vertretbaren Strom belastet und die Anlassspitze konnte massiv reduziert werden. Erst mit der Dreieckschaltung wurde die volle Drehzahl an einem Drehstrommotor erreicht. Jetzt wurden die einzelnen Wicklungen der Fahrmotoren direkt an den Leitern angeschlossen. Damit liegt nun an den einzelnen Spulen die volle Spannung an. der Motor kann schneller drehen und so die maximale Anzahl Umdrehungen erreichen. Wir haben damit zwei Möglichkeiten, einen Drehstrommotor zu betreiben. Gerade die Probleme bei der Regelung der Fahrmotoren und Drehstrom führte dazu, dass diese Systeme nach Einführung des Wechselstromes nicht mehr verwendet wurden. Die Anpassung der Geschwindigkeit war nur mit wenigen Stufen, die mit Anfahrwiderständen erreicht wurden, möglich. Wirtschaftlich gefahren werden konnte nur mit zwei Stufen und die ergaben wegen dem Aufbau des Fahrmotors feste Geschwindigkeiten, die nicht angepasst werden konnten. Geblieben sind die Systeme jedoch bei Bergbahnen. Diese können mit den beiden Schaltungen an den Fahrmotoren sehr wirtschaftlich fahren. So fährt man nur mit den Anfahrwiderständen an und benutzt für die Bergfahrt die Dreieckschaltungen. Auf der Talfahrt verwendet man die Sternschaltung, so dass sich eine tiefere Geschwindigkeit für die Talfahrt ergibt. Die Lokomotiven werden daher sehr wirtschaftlich betrieben. Mit den Regelungen der Drehzahl bei Drehstrom beenden wir den Weg durch die klassischen Lösungen. Dabei zeigen zwei Lösungen bereits den Weg zur modernen Technik. Die eine Lösung waren die Drehstrommotoren, die im Unterhalt unschlagbar sind. Warum das so ist, werden Sie noch erfahren. Die zweite Lösung lernten wir bei der Choppersteuerung kennen. So dass wir damit eigentlich schon zum Einstieg in die moderne Regelung der Zugkraft gekommen sind.
|
|||||
| Zurück | Navigation durch das Thema | Weiter | |||
| Home | Depots im Wandel der Zeit | Die Gotthardbahn | |||
| News | Fachbegriffe | Die Lötschbergbahn | |||
| Übersicht der Signale | Links | Geschichte der Alpenbahnen | |||
| Die Lokomotivführer | Lokführergeschichte | Kontakt | |||
|
Copyright 2022 by Bruno Lämmli Lupfig: Alle Rechte vorbehalten |
|||||

 Um
das etwas besser zu verstehen betrachten wir die Elektronenröhre und die
Diode etwas genauer. Sie erkennen so schnell, das beides eigentlich nur
halbe Gleichrichter sind. Dabei funktionieren sie wie ein
Rückschlagventil. Das heisst, sie lassen den
Um
das etwas besser zu verstehen betrachten wir die Elektronenröhre und die
Diode etwas genauer. Sie erkennen so schnell, das beides eigentlich nur
halbe Gleichrichter sind. Dabei funktionieren sie wie ein
Rückschlagventil. Das heisst, sie lassen den
