|
Beleuchtung und Steuerung |
|||
| Navigation durch das Thema | |||
|
Kommen wir zur
Beleuchtung
und Steuerung der
Lokomotive
und damit zu den von der
Fahrleitung
unabhängigen Bereichen. Auch hier waren diese erforderlich, denn ohne
konnte die Maschine gar nicht eingeschaltet werden. An der Tatsache, dass
die dazu erforderliche Energie gespeichert werden musste, änderte sich
auch jetzt nichts. Doch danach war nicht mehr alles so, wie man bei einem
Triebfahrzeug
erwarten würde.
Das hatte zur Folge, dass mit 36
Volt
gearbeitet wurde. Später kamen dann
Spannungen
bis zu 110 Volt vor und bei allen blieb immer das gleiche Pro-blem
erhalten, denn es mussten spezielle
Batterien
her. Hier wurde auch diesem Umstand grosse Beachtung geschenkt. Bleibatterien waren für diesen Einsatz unentbehrlich, jedoch mussten sie auch unterhalten werden. Gerade wenn es darum ging die Zellen zu erneuern war der Aufwand gross. Da diese
Batterien
auch bei den Fahrzeugen der Strasse verwendet wurden, sah man, dass sich
der Aufwand der Reparatur schlicht nicht mehr lohnte, denn die
Bleibatterien
waren Massenware. Bei den hier verwendeten
Bleibatterien
handelt es sich um handelsübliche Behälter für zwölf
Volt.
Diese insbesondere bei LKW benutzten Behälter konnten jedoch die für eine Lokomotive
benötigte
Kapazität
nicht bereit stellen. Aus diesem Grund griff man zu den Schaltungen
Parallel und Seriell. Um auch bei anderen Bereiche keine speziellen
Ersatzteile zu erhalten, wählte man die
Spannung
bei 24 Volt und somit bei den LKW. Wo sich die Vorteile ergaben, erfahren wir
später. An diesem mit
Gleichstrom
aufgebauten
Bordnetz
waren drei
Stromkreise
angeschlossen worden. Das war ein geschalteter Stromkreis für die
zahlreichen Verbraucher auf der
Lokomotive.
Daneben gab es aber noch jene, die direkt angeschlossen wurden und die
IT-Technik, die letztlich die Steuerung übernahm. Bevor wir jedoch dazu
kommen, bleiben wir noch beim zweiten Stromkreis.
Ohne die Steuerung aktiviert werden konnten
jedoch die
Makrofone
und die
Beleuchtungen
des
Maschinenraumes
und der beiden
Führerstände.
Das waren jene Lampen, die benötigt wurden um die
Lokomotive
in Betrieb zu nehmen. Sowohl für die Ausleuchtung der Führerstände, als auch für den Maschinenraum, wurden Leuchtstoff-röhren verwendet. Speziell aufgebaut war dabei die
Be-leuchtung
im Durchgang. Diese war erforderlich, weil es im
Maschinenraum
kein Fenster gab. Jedoch waren einige der verbauten Lampen aktiv, wenn der
Hahn zu den
Batterien
geöffnet worden war. Der Grund dafür war, dass der Durchgang auch als
Fluchtweg genutzt wurde. Die grösste Gefahr für die
Batterien
war die
Beleuchtung
im
Maschinenraum.
Waren die Türen verschlossen, konnte von aussen nicht erkannt werden, dass
die Lampen nicht gelöscht wurden. Aus diesem Grund wurde die
Spannung
überwacht und auch diese Verbraucher bei einer zu geringen Spannung
ausgeschaltet. Hier war aber das Problem der fehlenden Fenster zu
erkennen, denn durch diese wäre das Licht zu sehen. Wir kommen nun zur
Dienstbeleuchtung, auch wenn diese
direkt durch die Steuerung beeinflusst wurde, werfen wir einen Blick auf
diese Lampen, denn wir haben ja bereits erfahren, dass ein
Signalbild
gezeigt werden konnte. Welches das war, unterschied sich von Land zu Land.
So viel sei erwähnt das
Warnsignal der Schweiz gehörte dazu und alle
anderen Signalbilder waren durch die Steuerung überwacht und diese
steuerte die Lampe an.
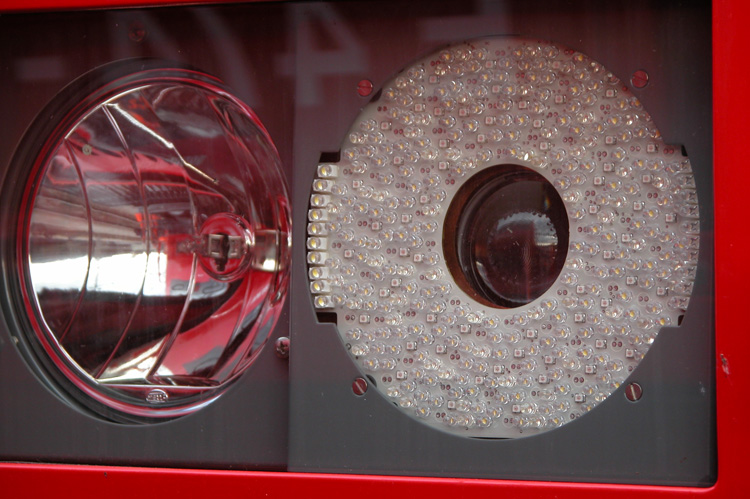
Dabei waren in jedem
Gehäuse zwei Lampen vorhanden, die wir ansehen müssen. Es spielt keine
Rolle, welche Seite wir nehmen, denn die waren auf gleicher Höhe und auch
mit den identischen Lampen versehen worden. Doch nun zum Aufbau derselben. Die beiden übereinander liegenden Lampen teilten sich in jene für das Signalbild und jene für das Fernlicht auf. Beim Signallicht waren die Farben rot und weiss möglich und es kamen LED zur Anwendung. Dabei war die Helligkeit so gross, dass mit diesen Lampen auch
das
Abblendlicht erstellt werden konnte. Es waren daher moderne Lösungen
vorhanden und dank den Leuchtdioden, war die Funktion nahezu immer
gesichert. Das zweite Lampenpaar war für die Wahl der
Steuer-spannung mitverantwortlich. Es handelte sich hier um ganz normale
Scheinwerfer, die mit Einsätzen versehen wurden, die das Halogengas
enthielten. Diese Lösungen waren auf der Strasse weit verbreitet und so
konnten die Ersatzteile zu günstigen Preisen bezogen werden. Benutzt
wurden diese für das Voll- und das
Fernlicht, das einen ansehnlichen Teil
der Strecke so erhellte, dass etwas erkannt werden konnte. Wenn wir nun zur oberen Lampe kommen, dann war diese
über den
Frontfenstern platziert worden und sie wurde nach dem gleichen
Muster, wie die Signallampen unten aufgebaut. Auch hier konnten sowohl
weiss, als auch rot signalisiert werden. Es war daher mit der
Lokomotive
möglich, dass sämtliche
Signalbilder gezeigt wurden. Wie diese aufgebaut
wurden, war jedoch Aufgabe der Steuerung und die wollen wir auch noch
ansehen.
Auch die Suche nach Störung war nicht einfach, denn einem elektronischen Bauteil sieht man nicht so leicht an, dass es beschädigt war. Im Werkzeug der
Lokomotive
waren daher kein Ham-mer
und Meissel vorhanden. Neu war aber ein Daten-kabel in diesem Werkzeug
vorhanden. Die ersten Unterschiede begannen schon bei der Inbetriebnahme. Wurde der Hahn zu den Batterien geöffnet, startete die Leittechnik auf. Das war durchaus ein Programm, das mit einem
Betriebssystem eines Computers verglichen werden konnte. Entsprechend
dauerte es, bis auf den
Bildschirmen die grafische Benutzeroberfläche zu
erkennen war. Erst wenn diese
Leittechnik
vollständig hochgefahren war,
konnte mit der Arbeit begonnen werden. Für die Kommunikation auf dem Fahrzeug war der
Multi-Vehicle-Bus MVB vorhanden. Die dort vorhandenen Schnittstellen
umfassten mehrere Bereiche. Zu diesem gehörten das zentrale Steuergerät
ZSG, die Antriebssteuergeräte ASG, die Anzeigen und natürlich sowohl
Bremsrechner, als auch ein
Diagnosesystem. Dabei konnte die Sprache für
die Ausgabe der Textmeldungen vom Personal nach seinen Wünschen angepasst
werden. Aktiviert wurde das ZSG mit der Besetzung des
Führerstandes. Dabei hatte jeder sein eigenes ZSG erhalten. Die Aufgabe
dieser Grundeinheit bestand darin die vom
Lokomotivpersonal
erteilten
Anforderungen an die Schnittstellen zu übertagen und von diesen
Statusmeldungen, oder gar Störungen auszugeben. Einige der an diesem ZSG
angeschlossenen Baugruppen wollen wir uns ansehen, denn sie übernahmen die
Aufgaben.
Dieser Aufbau wurde benötigt, um die vom Lokomotivpersonal erteilten Befehle so umzusetzen, dass daraus für die Strom-richter und die Fahrmotoren passenden Werte entstanden. Hier wurde also die
Spannung und die
Frequenz der Fahrmo-toren
jedes
Drehgestells
eingestellt und daher waren die ASG wichtig. Das ASG hatte jedoch noch weitere Aufgaben zu übernehmen. So wurden hier auch die Kontrollen vorgenommen und Fehler erfasst. Ein solcher Fehler war zum Beispiel, wenn die Drehzahl der Motoren nicht den Vorgaben entsprach. Das passierte, wenn die
Adhäsion
verloren ging. Die Effekte der
Drehstrommotoren begann hier nicht mehr zu
greifen. Daher musste eine Regelung für dieses Problem vorgesehen werden
und das war der
Schleuderschutz. Es war nicht der klassische Schleuderschutz vorhanden. Mit der Kraftschlussregelung wurde durch das ASG die Zugkraft so eingeregelt, dass der optimale Wert vorhanden war. Gegenmassnahmen, wie
es sie in der Schweiz gab, waren nicht vorhanden, denn die
Kraftschlussregelung griff nicht auf die
Bremse und auch nicht auf die
Sander zurück. Diese Massnahmen zur Verbesserung der
Haftreibung oblag dem
Lokomotivpersonal auf dem Fahrzeug. Die
Kraftschlussregelung reagierte auch, wenn die
Drehzahl zu gering war. In dem Fall war ein Gleiten vorhanden. Der
Gleitschutz arbeitete auf die gleiche Weise und so wurde die
elektrische
Bremse geregelt. Das Problem mit den gleichmässig rutschenden
Triebachsen
konnte nicht erkannt werden. Zudem griff das ASG auch in dem Fall nicht
auf die mechanischen
Bremsen, denn diese wurden mit dem
Bremsrechner
gesteuert.
So wurde
verhindert, dass die
Scheibenbremsen aktiviert wurden. Das erfolgte auch
während der
Bremsung und so wurde ein Ausfall eines ASG automatisch mit
der
Druckluft an den
Drehgestellen
aufgefangen. Diese Lösung hatte
Vorteile. Gerade bei den international eingesetzten Lokomo-tiven konnten so in einigen Ländern mit der An-wendung der elektrischen Bremse andere Bremsge-wichte gerechnet werden. Diese waren am Fahrzeug angeschrieben. Wir lassen die damit verbundenen
Bremsrechnung-en, denn es
war eine Lösung, die so in der Schweiz nicht angewendet wurde. Es zeigte
sich aber, was mit den
Bremsrechnern möglich war, denn die
Bremskraft
blieb erhalten. Der
Gleitschutz der
Lokomotive
griff auf den
Bremsrechner zu und sorgte so dafür, dass die
Triebachsen
nicht blockieren
konnten. Die Regelung arbeitete auf jede
Achse und eine gelöste
Bremse
wurde automatisch wieder angezogen. Aktiv war der Gleitschutz immer,
jedoch konnte er mit der
direkten Bremse
am Endanschlag ausgeschaltet
werden. Das war eine Funktion, die den Zug bei einer Störung am
Gleitschutz zum Stillstand brachte. Weil der
Bremsrechner so wichtig war, konnte ein
Ausfall schwere Folgen haben. Die
Lokomotive
bremste schlicht nicht mehr.
In dem Fall musste der Lokführer die Notbedienung aktivieren. So
wurde einfach die
Hauptluftleitung HLL entleert. Diese Entleerung hatte
immer eine
Bremsung zur Folge, weil nun das
Steuerventil direkt reagierte.
Um den Zug wieder zu lösen, musste aber der Rechner wieder arbeiten.
Der Hinweis wurde
dabei sowohl optisch, als auch akustisch mit der
Sprachausgabe
übermittelt. Die Betrachtung der Abhilfe bot Menü während der Fahrt und im
Stillstand an. Dabei waren unterschiedliche Informationen verfügbar. Neben einer bedienerfreundlichen Ausgabe war bei einem Diagnosesystem auch die Nachvollziehbarkeit wichtig. Diese Daten wurden aufgezeichnet und konnten in einer Werkstatt abgerufen werden. Dort
waren auch Informationen verfügbar, die dem
Lokomotivpersonal nicht mitgeteilt
wurden. Dort reichte, dass das ASG ausgefallen ist, welcher
Transistor
dafür verantwortlich war, musste das Personal der Werkstatt jedoch wissen. Auch die Fahrdaten wurden elektronisch aufge-zeichnet. Da hier eine grosse Menge Daten anfallen konnte, wurden nur einige Handlungen überwacht. Zudem wurden die Daten nach einer definierten Zeit
teilweise gelöscht und letztlich auch wieder überschrieben. Die dazu
vorhandenen zeitlichen Vorgaben waren je nach Land anders und umfassten
immer einen Zeitraum von mehr als einem Jahr, denn in der Zeit konnte eine
Auslesung erfolgen. Bei Ereignissen, die eine genaue Aufzeichnung der
Daten erforderlich machten, konnte der Speicher eingefroren werden. In dem
Fall blieben die Daten der letzten paar Minuten erhalten und wurden weder
ausgedünnt, noch gelöscht. Das konnte nur noch mit Auslesen der Daten
erfolgen. Wie diese Sperrung aktiviert wurde, war jedoch ein Teil der
Bedienung. Wichtig war, dass nun Daten im Bereich von Sekunden vorhanden
waren.
Die dabei an diesem
Zugdatenbus ange-schlossenen Fahrzeuge reagiert
ent-sprechend. Doch damit zur
Vielfachsteu-erung, die über drei Funktionen
verfügte. Das waren die Modelle ZDS,
ZWS
und
ZMS. Diese müssen wir daher
getrennt anse-hen. Die Modulation ZDS der zeitmultiplexen Vielfachsteuerung kam nur bei Störungen zur Anwendung. Sie erlaubte die Ver-bindung von zwei Lokomotiven und a-rbeitete mit weniger Daten. Da hier das UIC-Kabel für die Vielfach-steuerung genutzt wurde, konnte es dort zu einem Datenstau kommen. In dem Fall konnte mit der Lösung ZDS die
Datenmenge gemindert werden. Oft wur-den zuvor aber zwei Kabel für die
Über-tragung gesteckt. Mit der Schaltung ZWS kommen wir zu einer Situation, die in der Schweiz schlicht nicht angewendet wurde. Diese Abkürzung steht
für den Begriff zeitmultiplexe Wendezugsteuerung. Es war jetzt ein Betrieb
mit einem passenden
Steuerwagen möglich. Die Regelung sorgte auch dafür,
dass bei unbesetzten
Führerstand eine Verminderung der
Zugkräfte
vorgenommen wurde. So konnten die
Pufferkräfte eingehalten werden. Wenn wir nun endlich zur
ZMS und damit zur
Mehrfachtraktionssteuerung kommen, dann sind wir bei der eigentlichen
Vielfachsteuerung
angelangt. Diese erlaubte es, dass bis zu vier
Lokomotiven verbunden werden konnten. In dem Fall waren jedoch viele Daten
vorhanden und es konnte zu Störungen kommen. In dem Fall griff das
Personal zu zusätzlichen Kabeln und das führte dazu, dass die
Vielfachsteuerung optimal funktionierte.
Das galt zum Beispiel auch für eine Lokomotive mit vier Stromsystemen, oder eine die nur für Wechsel-spannung ausgelegt wurde. Es konnte
aber auch eine
Diesellokomotive sein. Speziell war, dass auch
Lokomotiven
anderer Her-steller, oder ältere
Baureihen mit der ZMS verbun-den werden
konnten. Welche Schaltungen und welche Handlungen vorgenommen
werden mussten, war die Aufgabe des Personals. Da auch dieses während der
Fahrt ausfallen konnte, musste eine Überwachung eingebaut werden. Es kam
dabei die
Sifa und somit die Lösung aus Deutschland zur Anwendung. Diese
war in allen befahrenen Ländern aktiv und in der Schweiz gab es keine
Anpassung, an die hier übliche
Sicherheitssteuerung und deren Lösungen. Bedient wurde die
Sifa mit einem Fusspedal. Dabei war
eine Zeitmessung aktiv und diese wurde auch gestartet, wenn im Stillstand
das
Pedal niedergedrückt wurde. Das losgelassene Pedal im Stillstand war
normal, daher war dies nicht überwacht. Auf die Bedienung und die Reaktion
der
Sicherheitsfahrschaltung werden wir später noch näher eingehen, denn
auch das gehörte eher in den Bereich der Bedienung und wurde nur von der
Steuerung überwacht. Es bleiben nur noch die
Zugsicherungen. Wenn wir uns
auf die
Lokomotiven von RC und SBB beschränken würden, währen diese schon
umfangreich. Zusammen mit den Lösungen der Modelle von BLS, SBB I und WRS,
kommen aber mehrere Systeme und
Zulassungen dazu und daher wird der Umfang so gross, dass
wir uns diese Ausrüstung in einem eigenen Kapitel ansehen müssen. So
können wir auch gleich berücksichtigen, was wo auch vorhanden war.
|
|||
| Letzte |
Navigation durch das Thema |
Nächste | |
| Home | SBB - Lokomotiven | BLS - Lokomotiven | Kontakt |
|
Copyright 2024 by Bruno Lämmli Lupfig: Alle Rechte vorbehalten |
|||
 Die
Versorgung dieser Systeme hatte sich in den letzten Jahren verändert und
es wurden immer wieder andere
Die
Versorgung dieser Systeme hatte sich in den letzten Jahren verändert und
es wurden immer wieder andere
 Am
permanenten Anschluss waren nicht nur die üblichen Verdächtigen
angeschlossen worden. Es war nun ein Teil des Signallichts vorhanden, auch
der
Am
permanenten Anschluss waren nicht nur die üblichen Verdächtigen
angeschlossen worden. Es war nun ein Teil des Signallichts vorhanden, auch
der
 Wenn wir mit den beiden unten montierten Lampen
beginnen, dann waren diese nicht mehr über den
Wenn wir mit den beiden unten montierten Lampen
beginnen, dann waren diese nicht mehr über den  Beim Aufbau der Steuerung gab es die grössten
Unterschiede zu den alten Modellen. Die verbaute Technik konnte manuell
schlicht nicht geregelt wer-den.
Beim Aufbau der Steuerung gab es die grössten
Unterschiede zu den alten Modellen. Die verbaute Technik konnte manuell
schlicht nicht geregelt wer-den. Beginnen wir mit dem Antriebssteuergerät ASG. Für
jedes
Beginnen wir mit dem Antriebssteuergerät ASG. Für
jedes
 Der
Der  Wichtig bei den erwähnten Störungen war eine gute
Diagnose. Diese wurde immer dem
Wichtig bei den erwähnten Störungen war eine gute
Diagnose. Diese wurde immer dem
 Die
Die
 Der grosse Vorteil dieser
Der grosse Vorteil dieser