|
Steuerung und Leittechnik |
|||
| Navigation durch das Thema | |||
|
Bei der Steuerung gab
es einen Punkt, der sich nicht von anderen Fahrzeugen der Bahnen
unterschied. So musste diese auch hier zur Verfügung stehen, wenn der
Triebzug
nicht eingeschaltet war. Nur so konnten die vom Bediener des Fahrzeuges
erteilten Aufgaben auch ausgeführt werden. Das kennen Sie von Ihrem
Automobil, denn auch dort wird zuerst die Zündung eingeschaltet und dann
erst der kräftig brummende Motor des roten Boliden.
Selbst das
Speichermedium wurde nur leicht ange-passt. Sie sehen, wie gut damals die
hier gewählte Lösung gewesen war. Anders gesagt, auch bei diesem
Triebzug
wurden die üblichen
Bleibatterien
verwendet. Bei diesen Batterien verwendete man für eine Zelle zwei Bleiplatten, die sich in einer Lösung befanden. Die früher noch verwendete verdünnte Säure hatte den Nachteil, dass bei der Ladung Knallgas entstand und die Batterien deswegen regelmässig gewartet werden mussten.
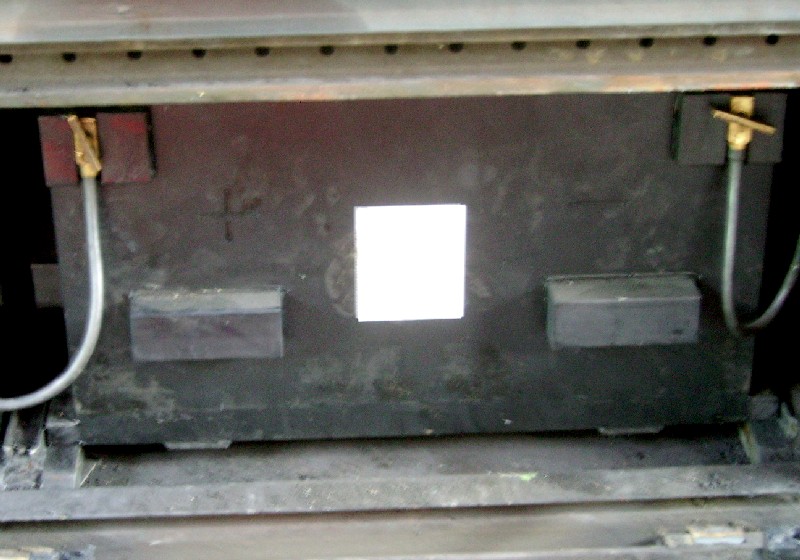
Hier kamen jedoch
geschlossene Zellen zur An-wendung und verwendet wurde ein Gel, das als
Elektrolyt wirkte. So konnten die Gefahren mit Bränden gemildert werden.
Verwendet wurden
Behälter aus Stahl, die neun Zellen besassen. Daher konnte an den Klemmen
eine
Spannung
von 18
Volt
abgegriffen werden. In Reihe geschaltet, ergab sich so die für die
Steuerung erforderliche Spannung von 36 Volt. Dabei war der Hersteller bei
der Wahl des Wertes nicht frei, denn die Schweizerischen Bundesbahnen SBB
gaben klar vor, dass man auch hier nicht viele neue Ersatzteile vorhalten
wollte.
Durch diese
überraschende Vorgabe, konnten die
Staatsbahnen
jedoch vorhandene Ersatzbatterien nutzen. Die Vorhaltung von speziellen
Behältern für anfänglich nur wenige Züge erschien dem Betreiber nicht als
sinnvoll. Nur musste auch dieser Ersatz ins Fahrzeug verbracht werden. Aus
diesem Grund konnte bei jeden
Triebkopf
seitlich der Kasten geöffnet werden. So waren die
Batterien
zugänglich und konnten mit Hebegeräten entnommen werden.
Das erfolgte wegen der
neuen
Leittechnik
deutlich schneller, als bei älteren Baureihen. Aus diesem Grund war eine
ausreichende Ladung der
Batterien
für den Betrieb des
Triebzuges
extrem wichtig geworden. Die von den Batterien unabhängige Versorgung dieses Bordnetzes erfolgte mit etwas mehr als 36 Volt ab dem Batterieladegerät des jeweiligen Triebkopfes. Die etwas höhere Spannung war erforderlich, damit die Bleibatterien geladen werden konnten.
Ein Effekt, der
üblich war, doch für uns wird das
Ladegerät
spannend, denn dieses bezog die Energie direkt aus dem
Zwischenkreis
des
Umformers.
Diese wurde in einem DC/DC-Wandler angepasst. Wurden die ersten Triebzüge noch mit einem Batterieladegerät pro Triebkopf ausgerüstet, achtete man später auch hier auf die möglichst gute Redundanz, so dass jedem Strom-richter ein Batterieladegerät nachgeschaltet wurde.
Dadurch hatten diese
Züge nicht weniger als vier
Batterieladegeräte
erhalten und waren somit gut mit Steuerenergie versorgt. Selbst wenn in
jeder Hälfte ein
Ladegerät
ausgefallen wäre, war die
Batterieladung
gesichert und man hätte man ohne Einschränkungen weiter-fahren können.
Fiel trotzdem die
Batterieladung
komplett aus, wurden je nach vorhandener
Spannung
in den
Batterien
von der
Leittechnik
gesteuert, einige Komponenten der Wichtigkeit nach abgeschaltet. So war
der
Triebzug
noch so lange einsatzbereit, dass er aus eigener Kraft eine Servicestelle
aufsuchen konnte. Das war deutlich mehr, als bei anderen Baureihen, wo in
diesem Fall nur mit sehr viel Glück der nächste
Bahnhof
erreicht wurde.
Dabei wurden durch
die
Spannung
die eigentlichen Funktionen ausgelöst. Dazu gehörten auch die Lampen der
Stirnbeleuchtung.
Wegen der langen Lieferzeit der Züge gab es hier Unterschiede, die
behandelt werden müssen. Die Züge erhielten an den beiden Fronten drei Lampen. Diese wurden auf gewohnte Weise angeordnet und bildeten daher ein Dreieck in Form eines A. An jeder Stelle konnte sowohl ein rotes, als auch ein weisses Licht erzeugt werden.
Die unteren beiden
Lampen besassen zudem noch die Funktion eines
Schein-werfers.
Damit war es möglich, alle im befahrenen Netz erforderlichen
Signalbilder
zur erzeugen. Lediglich in Italien gab es Ausnahmen.
Unterschiedlich waren
jedoch die verwendeten Leuchtmittel. Bei den älteren
Triebzügen
wurden normale
Glühbirnen
verwendet. Diese waren jedoch in der Lampe so eingebaut worden, dass ein
Wechsel nur mit grossem Aufwand erfolgen konnte. Das dazu erforderliche
Werkzeug und die Ersatzteile waren jedoch auf dem Zug vorhanden. Es war
deshalb dem Lokführer auch weiterhin möglich, die Glühbirne auszuwechseln.
Bei den
Triebzügen
RABe 523 nach dem Baumuster Flirt 3 wurde die
Beleuchtung
jedoch verändert. Die Tatsache, dass Leuchtmittel mit
Glühbirnen
in der Schweiz nicht mehr verkauft werden dürfen, betraf die Bahnen
zumindest am Anfang noch nicht. Jedoch war absehbar, dass auch diese
Glühbirnen in absehbarer Zeit wegen dem Gesetz ersetzt werden müssten.
Daher wurden die Stirnlampen der erwähnten Baureihe mit LED ausgeführt.
Um die
Beleuchtungen
abschliessen zu können, müssen wir noch wissen, dass es im
Führerstand
je nach Modell mehr oder weniger Lampen gab. Das geht von der Beleuchtung
des Raumes, bis zur hinterleuchteten Taste. Hier nun jede Lampe zu
betrachten, würde den Umfang einer Webseite sprengen. Wichtig ist aber,
dass die
Leuchtmelder
drei Zustände haben konnten. Das waren die Punkte dunkel, blinkend und
beleuchtet.
Während bei älteren
Triebzügen,
wie zum Beispiel dem
RAe TEE II an diesem
Punkt die Schaltungen und Verschlüsse vorgestellt werden, gab es diese
hier nicht mehr. Die Modelle der Baureihen RABe 521 bis RABe 524 wurden
über
Leittechnik
geregelt. Diese übernahm die Anforderungen des Bedienpersonals und führte
diese aus. Nach erfolgter Umsetzung des Auftrages gab der Rechner dem
Benutzer die entsprechende Rückmeldung.
Die bei so aufgebauten
notwendigen Signalverbindungen zwischen dem Bedienpunkt und dem Bereich
der Umsetzung, erfolgten über eigene Leitungen. Dabei wurde die
Leittechnik
von den Modellen der Reihe RABe 520 abgeleitet und nicht neu
konzipiert. So konnten bekannte Systeme und Programmierungen übernommen,
oder angepasst werden. Daher kam auch hier die Fahrzeugleittechnik MAS-T
aus dem Hause Selectron.
Sie müssen sich
vorstellen, dass die hier vorstellte Bau-reihe wesentlich mehr
Informationen verarbeiten muss-te, als der kürzere Gelenktriebwagen. Das
brachte die verwendeten Baugruppen an die
Leistungsgrenze, so dass man
spezielle Lösungen anwenden musste. Die Bussysteme des Fahrzeuges und die Zugbus-Netz-werke mussten also redundant ausgeführt werden und sie sollten zu den Gelenktriebwagen kompatibel bleiben. Dadurch war eine gemischte Vielfachsteuerung der bei-den Baureihen technisch möglich.
Die
sehr nahe Verwandtschaft der beiden Typen wurde also auch in der
Leittechnik
weitergeführt. Damit war man bei den Ingenieuren jedoch noch
nicht am Ende der Veränderungen angelangt.
Sie müssen sich vorstellen, dass in einem solchen
System jeder Punkt eine Adresse besitzen muss. Das kann ein
Stromrichter,
aber auch eine einfache Funktion, wie die Lampe zum
Fahrplan sein.
Die auf dem Fahrzeug umgesetzte Gesamtzahl der Knoten überstieg die
maximal mögliche Knotenzahl des CAN-Netzwerkes. Das ergab bei diesem Zug
automatisch das Problem mit der
Rückfallebene der beiden Netzwerke, denn diese
war gefordert.
Dabei musste beachtet werden,
dass ein Brand in einem Fahrzeugteil nicht zum Totalausfall der
Leittechnik
und damit des Fahrzeuges führen durfte. Der
Triebzug musste
sich in einem solchen Fall noch aus eigener Kraft aus einem
Tunnel retten
können. Die
Redundanz musste also auch in diesem Extremfall gewährleistet
bleiben, was die Programmierer sicher herausforderte. Daher müssen wir
etwas genauer auf diese Leittechnik sehen.
Bei den RABe 521 bis RABe 524
wurde das Fahrzeugbussystem in zwei Einzelsysteme unterteilt. Jedes
Teilsystem wurde von einer Central Processing Unit (CPU) als
Master
geführt. Beide CPU im Fahrzeug waren über die «grüne» Leitung verbunden
worden. Diese stellte eine direkte Kommunikation der beiden CPU dar,
wodurch die Verteilung der Masterfunktion und eine gegenseitige
Überwachung und Kontrolle jederzeit sichergestellt waren.
Der
Triebzug hatte daher
effektiv zwei Leittechniksysteme erhalten, die miteinander innerhalb des
Zuges kommunizierten. Um jedoch auch eine physikalische Abtrennung
einzelner Fahrzeugbereiche zu erreichen, waren an geeigneten Stellen
Buskoppler installiert worden. So führte die nicht trennbare Verlegung der
Leitungen des
Fahrzeugdatenbusses bei einem Brand nicht zu einem Ausfall des
Gesamtsystems und somit des Zuges.
Die
Redundanz des
Triebzuges
blieb so auch auf Ebene der
Leittechnik
erhalten. Der verbleibende intakte
Antrieb konnte das Fahrzeug bis zum nächsten Halteplatz befördern, wo dann
die Fahrgäste den Zug verlassen konnten. Die Leittechnik und somit die
Regelung des Fahrzeuges war daher immer noch gewährleistet, wenn der eine
Fahrzeugdatenbus total ausgefallen war. Die durchdachte Redundanz bis in diese
Ebene führte zu einem ausgesprochen zuverlässig arbeitenden Fahrzeug.
Selbst die Kombination mit den Gelenktriebwagen der Baureihe RABe 520 war
kein Problem. Dazu wurde das System CAN Powerline der Firma Selectron
verwendet. Dieses war ebenfalls redundant aufgebaut worden. Das Kommunikationssignal wurde von einer 48 Volt Trägerspannung überlagert. Durch die Eingangsbeschaltung der Zugbuskoppler wurde ein minimaler Stromfluss von 20 mA gewähr-leistet. Dieser Strom diente jedoch der Überbrückung der Kontaktwiderstände, die durch Verschmutz-ung, Feuchtigkeit, oder ähnliches stark schwanken konnten. Dadurch wurde eine zuverlässig funktionierende Vielfachsteuerung ermöglicht. Was deren Nutzen steigerte.
Die betrieblich maximale
Anzahl am
Zugbus angeschlossener Fahrzeuge war dabei auf vier
Triebzüge
beschränkt worden. Technisch wären jedoch auch längere
Kompositionen und
umfangreichere Kombinationen möglich gewesen. Dabei konnten die Triebzüge
der oben erwähnten Baureihen beliebig formiert werden. Betrieblich war das
beim Betreiber jedoch wegen der speziellen Strecke der Reihe RABe 520
nicht vorgesehen.
Wegen der Bauweise mit sehr
glatten
Laufflächen und wegen der
Vielfachsteuerung musste ein
Schleuderschutz verbaut werden. Die Drehzahl der einzelnen
Radsätze wurde
von den jeweiligen Radsonden an die
Leittechnik
übermittelt. Damit
erkannte diese die unterschiedlichen Drehzahlen zwischen den einzelnen
Radsätzen des
Triebzuges und konnte die erforderlichen Gegenmassnahmen,
wie das Anlegen der
Schleuderbremse umsetzen.
Diese Beschränkung konnte jedoch auch verwendet werden um die
normalen Werte für die Beschleunigung unter der Vorgabe von 1.2 m/s2
zu halten. So regelte der verbaute
Schleuderschutz die Beschleunigung
grundsätzlich. Ausgedacht war auch die Bremssteuerung des Fahrzeuges. Der normale Bremsvorgang erfolgte mit der wirtschaftlichen elektrischen Bremse. Diese wurde je nach den Vorgaben bis zur maximalen Leistung aufgeschaltet und sorgte so für eine ausreichende Verzögerung des Zuges.
Wurden jedoch durch den Lokführer, oder die
Leittechnik
höhere
Verzöger-ungswerte verlangt, wurde auch die pneumatische
Bremse
der
Laufachsen
aktiviert.
Hier funktionierte der
Schleuderschutz, als
Gleitschutz. Sobald die von den Achsgebern erhaltenen Informationen ein
Gleiten der
Radsätze erkennen liess, regulierte der Gleitschutz die
elektrische
Bremse so, dass die
Triebachsen nicht blockierten. Die nun
fehlende
Bremskraft
der Triebachsen wurde automatisch durch die
pneumatische
Bremse
der
Laufachsen ergänzt, so dass keine Reduktion der
Bremsleistung
eintreten sollte.
Ergänzt wurde die
Leittechnik
durch ein Diagnose- und Anzeigesystem. Fahrzeuge, die mit solchen Systemen
ausgerüstet wurden, waren seit einigen Jahren üblich. Der Lokführer hatte
jedoch nur so die Möglichkeit, die vorhandene Störung zu erkennen und
diese zu beheben. Mit Hammer und Meissel war hier nichts zu erreichen. Das
bedeutete jedoch, dass er mit präzisen Angaben und Lösungsmöglichkeiten
versorgt werden musste.
Der
Bildschirm hatte im normalen Betrieb ein Werksbild mit wichtigen Fahr-daten
aufgeschaltet und konnte mit diversen Menüpunkten auch für spezielle
Schaltungen, wie die umfassende
Bremsprobe
herangezogen werden. Daher
wurden hier nicht nur Störungen behandelt. Die Anzeigen der Störungen waren so ausgelegt, dass diese den Lokführer auf der Fahrt nicht mit langen Textmeldungen von seiner Aufgabe ablenkten. Je nach Schwere der erfassten Störung wurden unterschiedliche Aktivitäten geschaltet.
Eine
Einfachstörung führte daher nur zu einer Anzeige mit kurzer Text-meldung
und knappem Hinweis auf die Fahrt auf dem
Bildschirm. Der Lok-führer
erkannte so sofort, ob er anhalten muss, oder weiterfahren kann. Umfangreiche Störungen wurden zusätzlich im direkten Blickfeld des Lokführers mit einer roten Störungslampe angezeigt. Zusätzlich erfolgte die Störungsanzeige auch auf dem Bildschirm mit der schon erwähnten kurzen Textmeldung.
Auch jetzt
wusste der Lokführer sofort, wie er sich zu verhalten hat. Als Beispiel
sei hier die Textmeldung «Brandschutz angesprochen [ANHALTEN]» erwähnt.
Diese
Meldung würde mit der Störungslampe ergänzt.
Der Lokführer konnte auf der
Fahrt genauere Hinweise einholen, indem er das
Diagnosesystem aufrief. Dort
wurde die Störung mit dem gleichen Text angezeigt. Er konnte nun die
Lösungshinweise für die Fahrt, oder für den Stillstand aufrufen.
Detaillierte Behebungshinweise gab es jedoch nur im Stillstand, so dass
der Lokführer nicht mit unnötigen Hinweisen abgelenkt wurde und sich auf
die weitere Fahrt konzentrieren konnte.
Störungen, die sogar eine Behebung während der Fahrt
erforderten, konnten mit einer gelb blinkenden Pannenlampe behoben werden.
Der Lokführer drückte dazu einfach die entsprechende Taste, worauf die
notwenigen Abtrennungen erfolgten. Der Diagnosebildschirm zeigte daraufhin
die zu beachtenden Einschränkungen auf. Die Fahrt konnte so fortgesetzt
werden und der Zug kam nicht an ungeeigneter Stelle zum Stehen.
Das System besass zudem ein
interner
Datenspeicher, der die erkannte Störung und die Behebung
protokollierte, so dass sie vom Wartungsteam nachvollzogen werden konnte.
Das vereinfachte den Unterhalt der defekten Fahrzeuge deutlich, da sich
das Serviceteam nicht nur auf die Störungsmeldungen des Lokführers
verlassen musste. Dank des Protokolls wurde auch erkannt, welche Anzeige
erfolgte und auf welche Informationen der Lokführer reagierte.
Mit der Diagnose haben wir
uns eigentlich schon in die Regelung des Fahrzeuges vertan, so dass wir
das Thema
Leittechnik
mit den
Bussystemen nun beenden und die Bedienung des
Triebzuges
betrachten. Dabei muss aber erwähnt werden, dass die Handlungen sehr eng
mit der Leittechnik und der Steuerung gekoppelt waren, denn schliesslich
wurden die Befehle des Lokführers an die Leittechnik übermittelt. Einen
direkten Zugriff gab es jedoch nicht.
|
|||
| Letzte |
Navigation durch das Thema |
Nächste | |
| Home | SBB - Lokomotiven | BLS - Lokomotiven | Kontakt |
|
Copyright 2021 by Bruno Lämmli Lupfig: Alle Rechte vorbehalten |
|||
 Versorgt
wurde daher der Bereich für die Steuerung ab
Versorgt
wurde daher der Bereich für die Steuerung ab  Jeder
Jeder
 Jedoch
war es bei vier
Jedoch
war es bei vier
 Die
Die
 Hauptmerkmal dieser
Hauptmerkmal dieser
 Die Lösung mit physikalisch
getrennten Busleitungen konnte nicht mehr verwendet werden. Das Netzwerk
war einfach zu wenig leistungsfähig für die grössere Anzahl
Schnittstellen. Daher verwendete man bei den hier vorgestellten Baureihen
für die Schweizerischen Bundesbahnen SBB ein anders aufgebautes
Fahrzeugbussystem. Dies ermöglichte eine optimale
Die Lösung mit physikalisch
getrennten Busleitungen konnte nicht mehr verwendet werden. Das Netzwerk
war einfach zu wenig leistungsfähig für die grössere Anzahl
Schnittstellen. Daher verwendete man bei den hier vorgestellten Baureihen
für die Schweizerischen Bundesbahnen SBB ein anders aufgebautes
Fahrzeugbussystem. Dies ermöglichte eine optimale  Auf dem vorgestellten
Auf dem vorgestellten
 Der so geregelte
Der so geregelte
 In jedem
In jedem