|
Steuerung des Triebwagens |
|||
| Navigation durch das Thema | |||
|
Mittlerweile ist es hinlänglich bekannt, dass man auf elektrischen
Triebfahrzeugen
ein eigenes Stromnetz installieren muss. Das war auch jetzt nicht anders
zu erwarten. Bei den hier vorgestellten
Triebwagen
wurde daher ebenfalls ein als
Steuerstromnetz
bezeichnetes
Bordnetz aufgebaut. Dieses hatte die Aufgabe, grundlegende
Funktionen bereit zu stellen. Dieses Netz funktionierte jederzeit und von
der
Fahrleitungsspannung
unabhängig.
Die Versorgung dieses
Bordnetzes erfolgte mit
Gleichstrom.
Nur bei dieser Stromart war es damals möglich, leistungsfähige Speicher zu
erstellen. Die dabei verwendeten Modelle gaben letztlich vor, welche
Spannung
beim Bordnetz zu erwarten war. Grosse Überraschungen wird es nicht geben,
denn die Vorgaben der BLS-Gruppe
waren klar definiert. So mussten Kombinationen der Steuerung mit anderen
Fahrzeugen möglich sein.
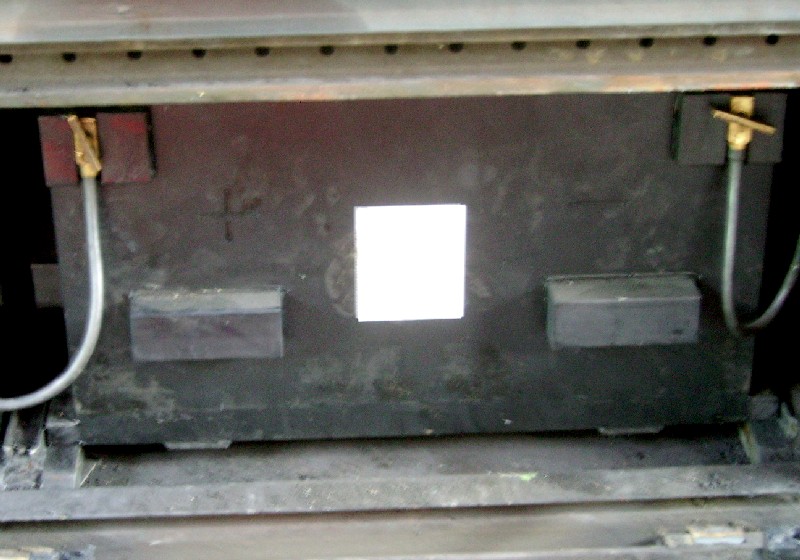
Der Vorteil dieser Nasszellen war, dass sie hohe
Ströme
liefern konnten und dass sie sehr leicht geladen werden konnten. Als
Nachteile wurden das Gewicht und die Bildung von Knallgas aufgeführt. Gerade das Gewicht stellte hohe Anforderungen an den Einbau. Daher wurden die Batterien unter dem Wagenkasten in einem eigenen Fach montiert. In jedem Batteriekasten konnten zwei solcher Bat-terien über den Deckel und den dort vorhandenen Gleitbahnen eingeschoben werden.
Da diese Lösung bei jeder Hälfte vorhanden war, konnte man bei
Triebwagen
insgesamt vier solcher
Batterien
montieren. Jeweils die zwei in einem Kasten untergebrachten Batterien wurden in Reihe geschaltet. Damit war die Spannung klar.
Jede dieser genormten
Bleibatterien
hatte eine
Spannung
von 18
Volt.
Durch die Schaltung von zwei solchen
Batterien
wurde mit 36 Volt letztlich die
Gleichspannung
für das
Bordnetz erreicht. Damit hatten wir eine unterbruchsfreie
Stromversorgung für das Steuerstromnetz des
Triebwagens
erhalten.
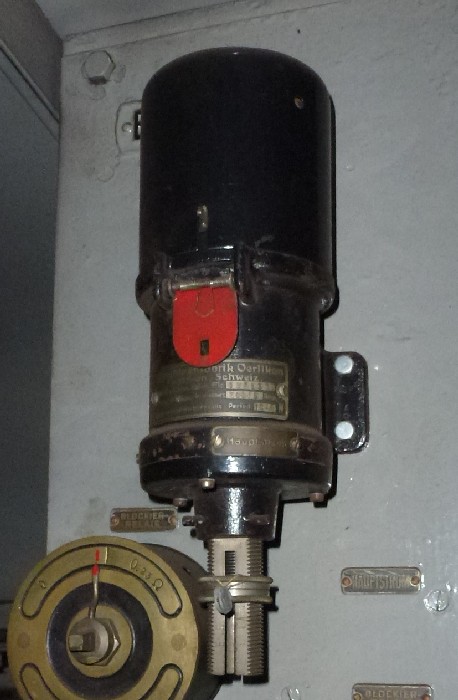
Damit diese
Batterien
immer mit der vollen Kapazität zur Verfügung standen, mussten diese im
Betrieb wieder geladen werden. Hier wurde nun ein Vorteil der Batterien
genutzt. War die anliegende
Spannung
höher, als jene der Batterien, wurde automatisch eine Ladung derselben
erreicht. Damit war es möglich, das
Bordnetz über die elektrische
Ausrüstung zu versorgen und gleichzeitig ohne spezielle Einrichtungen die
Batterien zu laden.
Zudem war trotz geringerem Gewicht dieser
Ladege-räte
eine höhere
Leistung
vorhanden. Nebeneffekt war, dass bei abgestellter
Ventilation
auch das leise Summen eines
Umformers
verschwunden war. Damit hatte man ein stets bereitstehendes und von der Fahrleitungsspannung unabhängiges Bordnetz erhalten. Das bedeutete aber auch, dass bei vielen Funktionen elektrische Signale verwendet wurden.
Diese Lösung wurde hier,
im Gegensatz zu früheren Fahrzeugen, konsequent verwendet. Nur so war der
Triebwagen
technisch auch in der Lage, von einem
Steuerwagen
oder von einem anderen Triebwagen aus, bedient und gesteuert zu werden.
Beim bedienten
Triebwagen
erfolgte die Steuerung, wie die Bedienung, ab einem der beiden
Führerstände.
Dort wurden die benötigten Befehle an die Steuerung erteilt. Die Position
von
Schaltautomaten
und
Sicherungen,
konnte man hingegen zentral wählen, so dass diese nicht an die
Führerstände gebunden waren. Das sorgte dafür, dass diese dort eingebaut
wurden, wo der notwendige Platz vorhanden war. Das war, wie könnte es
anders sein, der
Maschinenraum.
Die grundlegende Aufgabe der Steuerung war die Bereitstellung der
für die Funktion des
Triebwagens
erforderlichen Aufgaben und deren Überwachung. Dazu gehörte zum Beispiel
auch, dass die Signale zum Heben des
Stromabnehmers
und zum Einschalten des
Hauptschalters
übertragen werden mussten. Damit sorgte eigentlich die Steuerung selber
dafür, dass das für sie wichtige
Bordnetz vom
Ladegerät
gestützt wurde.
Der
Hauptschalter
ist ein gutes Beispiel für die Aufgaben der Überwachung. Wurde dieser
eingeschaltet, gelangte die hohe
Spannung
der
Fahrleitung
auf das Fahrzeug. Das konnte nun aber dazu führen, dass es zu einem
folgenschweren Defekt am Fahrzeug kommen könnte. Die Energie reichte dabei
durchaus um das Fahrzeug in Brand zu setzen. Damit das nicht passierte,
wurde der Hauptschalter durch die Steuerung überwacht.
Natürlich wäre die Liste länger, aber wichtig war, dass nicht alle
Relais
gleich auf den
Hauptschalter
wirkten und es zum Teil Relais gab, die gar nicht zum Hauptschalter
gehörten. Nicht nur technische Funktionen wurden durch die Steuerung überwacht. Auch das Bedien-personal war einer gewissen Kontrolle durch die Steuerung unterworfen. Dazu gehörte die auf dem Triebwagen eingebaute Sicherheitssteuerung.
Diese arbeitete mit zwei unterschiedlichen Programmen und
reagierte auf die zurückgelegte Distanz. Sie war bei Fahrzeugen mit
sitzender Bedienung vorgeschrieben und seit Jahren dem Personal bekannt. Wurde das Pedal nicht bedient, weil es beispielsweise dem Lokführer schlecht ging, reagierte die Einrichtung nach 50 Metern. Es erklang nun ein Warnton, der das Personal auf das Versäumnis aufmerksam machen sollte.
Erfolgte keine Reaktion, die mit dem Drücken des
Pedals
bestätigt wurde, erfolgte nach weiter-en 50 Metern die
Zwangsbremsung.
Gleichzeitig wurde der
Hauptschalter
ausgeschaltet und so die
Zugkraft
unterbunden. Der Zug kam daher zum Stillstand. Die Wachsamkeitskontrolle bestand aus einem etwas anderen Ablauf. Wurde während 1 600 Metern keine Handlung ausgeführt, wurde der als Langsamgang bezeichnete Vorgang eingeleitet. Auch jetzt erfolgte eine akustische Warnung mit einem veränderten Ton.
Wurde darauf auch nach 200 Metern nicht reagiert, wurde der
Triebwagen
ausgeschaltet und eine
Zwangsbremsung
eingeleitet. Auch jetzt kam der Zug zum Stillstand.
Mittlerweile kam die
Zugsicherung
nach
Integra-Signum
auch auf den Strecken der BLS-Gruppe
zur Anwendung. Diese von den Schweizerischen Bundesbahnen SBB eingeführte
Einrichtung wurde daher zum Standard ernannt. Als direkte Folge davon,
musste auch die BLS-Gruppe ihre
Triebfahrzeuge
mit einer Zugsicherung ausrüsten. Bei den hier vorgestellten
Triebwagen
erfolgte das natürlich bei der Ablieferung durch die
Hauptwerkstätte
der BLS.
Wurde diese
Warnung
nicht mit dem Schalter quittiert, kam es zur
Zwangsbremsung.
Auch jetzt wurde natürlich auch der
Hauptschalter
ausgelöst und der Zug kam zum Stillstand. Eine
Haltauswertung
für
Hauptsignale
gab es hingegen nicht. Sowohl die Sicherheitssteuerung, als auch die Zugsicherung, konnten zurückgestellt werden. Nur so war eine Weiterfahrt des Zuges überhaupt möglich. Dabei musste die versäumte Handlung ausgeführt werden und zumindest die Sicherheitssteuerung korrekt bedient werden.
Die
Zwangsbremsung
löste sich wieder und der
Hauptschalter
konnte eingeschaltet werden. Angewendet wurde diese Rückstellung in erster
Linie bei der täglichen Prüfung.
Neben diesen grundlegenden Funktionen der Steuerung gab es noch
andere Aufgaben. In erster Linie handelte es sich um Einrichtungen, die
auch funktionieren mussten, wenn die Hochspannung nicht vorhanden war. Das
konnte zum Beispiel sein, da sich der
Hauptschalter
wegen einem
Kurzschluss
nicht einschalten liess. Um den Schaden zu suchen, benötigte man Licht,
denn solche Störung treten bekanntlich nur in der Nacht und in
Tunnels
auf.
Die
Beleuchtung
teilte sich in zwei Bereiche. So wurde die Innenbeleuchtung der Abteile
über die Steuerung geführt. Diese Beleuchtung war direkt an der
Batterie
angeschlossen worden. Damit stand sie teilweise auch zur Verfügung, wenn
der
Triebwagen
grundsätzlich ausgeschaltet war. In diesen Fällen war nur Personal
anwesend und das benötigte an anderen Stellen Licht, als das zum Beispiel
die Reisenden wünschten.
Gerade hier waren bis vor wenigen Jahren zahlreiche Signalbilder vorgesehen, die mit Vorstecktafeln erstellt wurden.
Mittlerweile waren diese Signalisationen verschwunden und die
Beleuchtung
deutlich einfacher ausgeführt. Je-doch veränderten neue
Signalbilder
die Lampen dieses
Triebwagens. Diese Dienstbeleuchtung wurde an den beiden Fronten angebracht. Dabei wurden die Lampen in der Form eines A montiert. Die obere Lampe, die bisher im Bereich des Daches montiert war, wurde leicht nach unten verschoben. Dadurch montierte man die Lampe in der Fronttüre.
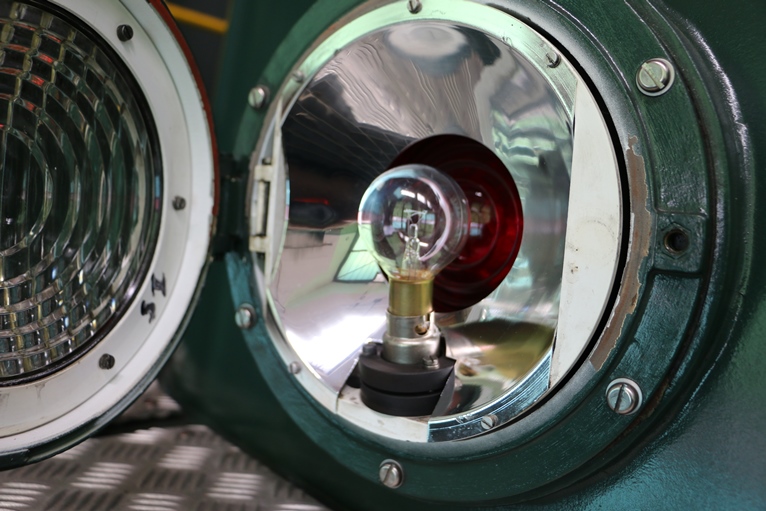
Da neue Doppellampen verwendet wurden, konnte auf die zweite mit
rotem Licht verzichtet werden. Die Far-ben Weiss und Rot kamen von einer
Lampe.
Die beiden unteren über den
Puffern
montierten Lampen mit weissem Licht, wurden etwas grösser ausgeführt. Sie
konnten neben dem normalen Licht auch ein
Fernlicht
erzeugen und verhinderten deshalb die Doppellampen, wie sie oben montiert
war. Jedoch war die Lichtausbeute dieser
Scheinwerfer
so gering, dass am Tag das Fernlicht eingeschaltet werden musste, um
überhaupt die
Dienstbeleuchtung
des
Triebwagens
zu erkennen.
Jedoch verhinderten diese
Scheinwerfer,
dass die Lampen unten rot zeigen konnten. Das war besonders beim
regelmässig verwendeten
Zugschlusssignal nötig. Damit dieses
Signalbild
gezeigt werden konnte, war über beiden Lampen eine zusätzliche etwas
kleinere rote Lampe mit Sonnendach für das übliche Schlusssignal eingebaut
worden. Diese Lösung war neu, denn bisher verzichtete man bei der BLS-Gruppe
auf die zweite rote Lampe unten.
Einen sehr speziellen Teil der Steuerung stellte die
Vielfachsteuerung
dar. Mit Hilfe dieser Einrichtung war es möglich, die
Triebwagen
untereinander, oder ab einem
Steuerwagen
zu bedienen. Dabei waren durchaus beliebige Kombinationen möglich. Die
Funktion indes war eigentlich einfach, denn man verschob nur den
Führerstand
aus dem Fahrzeug. Die Signale für die Steuerung des Fahrzeuges wurden
einfach über ein Kabel übertragen.
Die einzige vorher beschriebene Funktion, die bei der
Vielfachsteuerung
nicht durch das Kabel übertragen wurde, war die
Zugsicherung.
Diese musste bekanntlich auf dem führenden Fahrzeug aktiv sein. Ein am
Schluss fahrender
Triebwagen
passierte die Signale oft in veränderte Stellung und hätte so zu Störungen
geführt. Daher wurde diese Einrichtung in diesem Fall von der Steuerung
überbrückt. Sie war, wenn das Fahrzeug ferngesteuert wurde, nicht mehr
aktiv.
Die bisher bei der BLS-Gruppe
verwendete Version der SAAS hatte dabei ein grosses Problem. Diese
funktionierte zwar sehr zuverlässig, auch wenn kaum Erfahrungen vorlagen.
Jedoch waren die neuen
Einheitswagen
der BLS-Gruppe zu diesem System nicht kompatibel. Der Grund lag beim
Kabel, denn die
Triebwagen
ABDe 4/8 und die Wagen hatten unterschiedliche Steckdosen erhalten. So war
klar, dass man diese
Vielfachsteuerung
nicht mehr verwenden konnte.
Damit konnten theoretisch auch Wagen der
Staatsbahn
in die
Pendelzüge
mit diesen
Triebwagen
eingereiht werden. Dabei waren die Funktionen
Beleuchtung,
Lautsprecheranlage
und Türschliessung auf klar definierten Leitungen gelegt worden. Da man bei der Vielfachsteuerung nach SAAS andere Protokolle verwendete, war diese Vielfachsteuerung nur mit den Steuerwagen der BLS-Gruppe und den entsprechend umgebauten Triebwagen kompatibel.
Der Bildung eines
Pendelzuges
mit
Einheitswagen
und
Steuerwagen
stand daher nichts mehr im Weg. Dabei mussten lediglich der Steuerwagen
und das
Triebfahrzeug
zusammenpassen. Die Wagen konnten frei gewählt werden. Gerade hier zeigte sich, dass eine Harmonisierung bei den Vielfachsteuerung durchaus sinnvoll gewesen wäre. Diese wurde auch umgesetzt, denn mit dem Umbau der anderen Triebwagen auf dieses Kabel, konnte man Kombinationen von ABDe 4/8 der unterschiedlichen Baulose erstellen.
Das war jedoch selten der Fall, aber dank dieser Möglichkeit
konnten bei allen
Triebwagen
der Baureihe ABDe 4/8 die gleichen
Steuerwagen
verwendet wer-den.
Mit der
Vielfachsteuerung
können wir jedoch die Steuerung soweit ab-schliessen. Es muss gesagt
werden, dass die Funktion der Vielfachsteuerung auch die beiden Hälften
des
Triebwagens
ähnlich verbunden hatte. Die weiteren Funktionen hingen sehr stark mit der
Bedienung des Fahrzeuges zusammen. Daher verzichte ich jetzt auf deren
Erwähnung und wir sehen uns diese Funktionen im nächsten Kapitel genauer
an.
|
|||
| Letzte |
Navigation durch das Thema |
Nächste | |
| Home | SBB - Lokomotiven | BLS - Lokomotiven | Kontakt |
|
Copyright 2018 by Bruno Lämmli Lupfig: Alle Rechte vorbehalten |
|||
 Man
verwendete für die Versorgung der Steuerung die genormten
Man
verwendete für die Versorgung der Steuerung die genormten  Dazu war das von den
Dazu war das von den
 Mit
Hilfe von
Mit
Hilfe von
 Die
Die
 Der
zweite Bereich war die
Der
zweite Bereich war die  Dank
diesen Lampen, konnte der
Dank
diesen Lampen, konnte der  Die
Steckdose für die
Die
Steckdose für die